Google Search performance data is the most widely used data in Search Console. This post explains
in detail the data available and how Google processes it, including privacy filtering and other
limitations related to serving latency, storage, and processing resources. Ever wonder how
these systems work? Let's do a deep dive into them..
This announcement was made at Google Cloud Next ‘22. Visit the Cloud Blog to learn more about the latest Google Workspace innovations for the ever-changing world of work.
You can find and navigate to the threads you’re following or where you’re specifically mentioned with a new thread panel on the right side of the conversation. Visual indicators, such as a badge for the number of replies, direct@ mentions, and when a message is deleted within a thread, will help you stay on top of the latest activity in any given thread.
Who’s impacted
End users
Why you’d use it
With in-line threading, you can reply to a specific message in the space. This can be useful in scenarios such as:
Answering questions with in-line replies, while not disrupting the flow of the main space
Starting a break-out discussion for topics that may not be of interest to everyone. By default, replying in-line will notify the original poster and those who have either been @ mentioned or replied in the thread. Other users will have the ability to subscribe to the chain by opening the in-line replies and selecting “Follow.”
Replying to an older message when the main discussion has moved on to a different topic
We hope that by incorporating in-line threading into spaces, it will also be easier and more intuitive for users to scan the space and know what’s going on. It will also help reduce noise for many users, as they will only be notified for replies to threads they participated in or choose to follow.
We are also making improvements to navigating the space. With the new thread navigation panel, you can browse through all the threads in the space, and you can also filter for only threads you’re following or where you’re specifically mentioned.
Additional details
In-line threading functionality will depend on which type of space you’re using:
In-line threading will be available in existing spaces where there is a single stream of unthreaded messages, previously known as “unthreaded spaces.”
Existing spaces with messages and replies grouped together for everyone in the main chat window were previously known as “threaded spaces” and will now be referred to as “spaces organized by conversation topic.” These spaces will not have in-line threading and cannot be reconfigured.
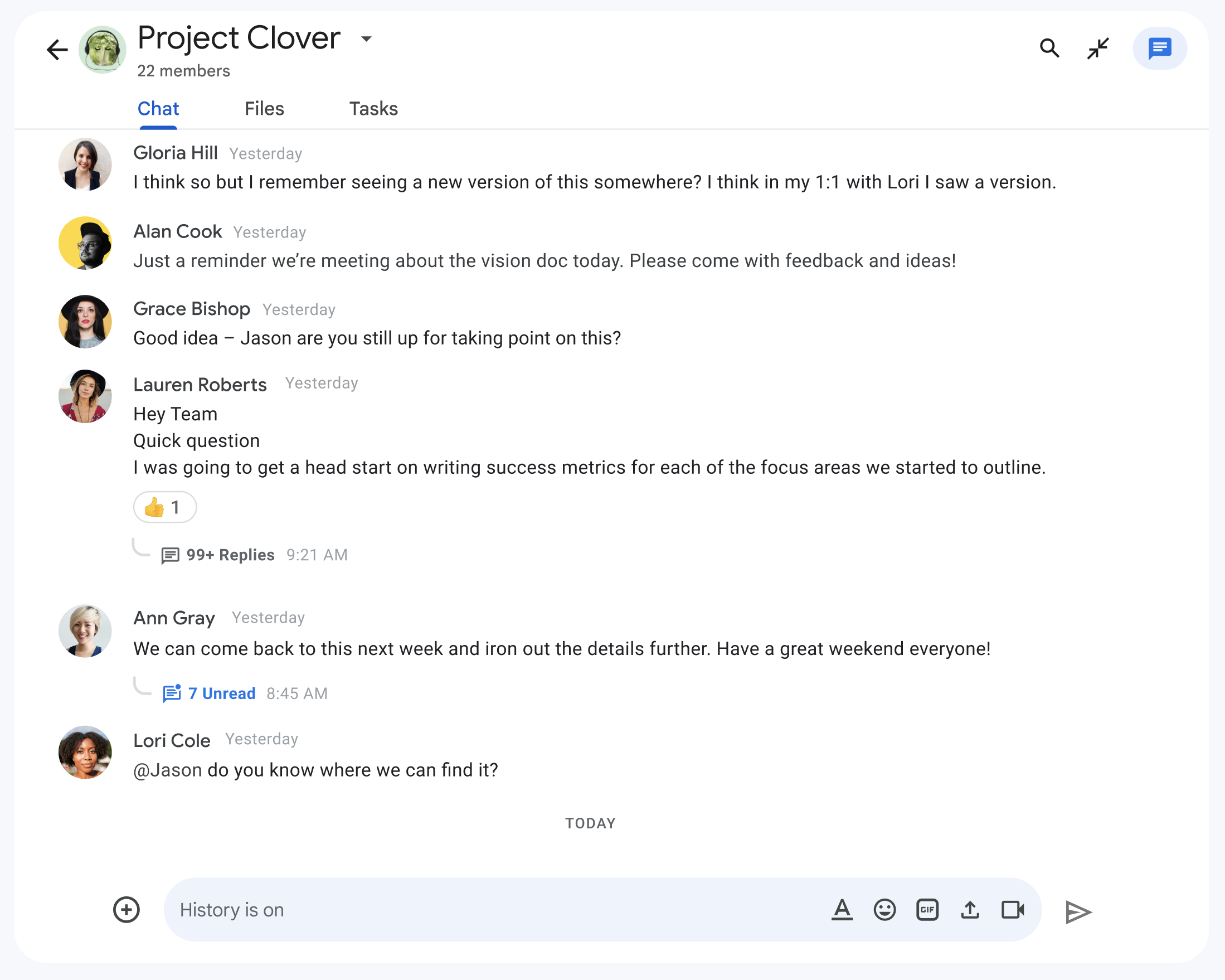
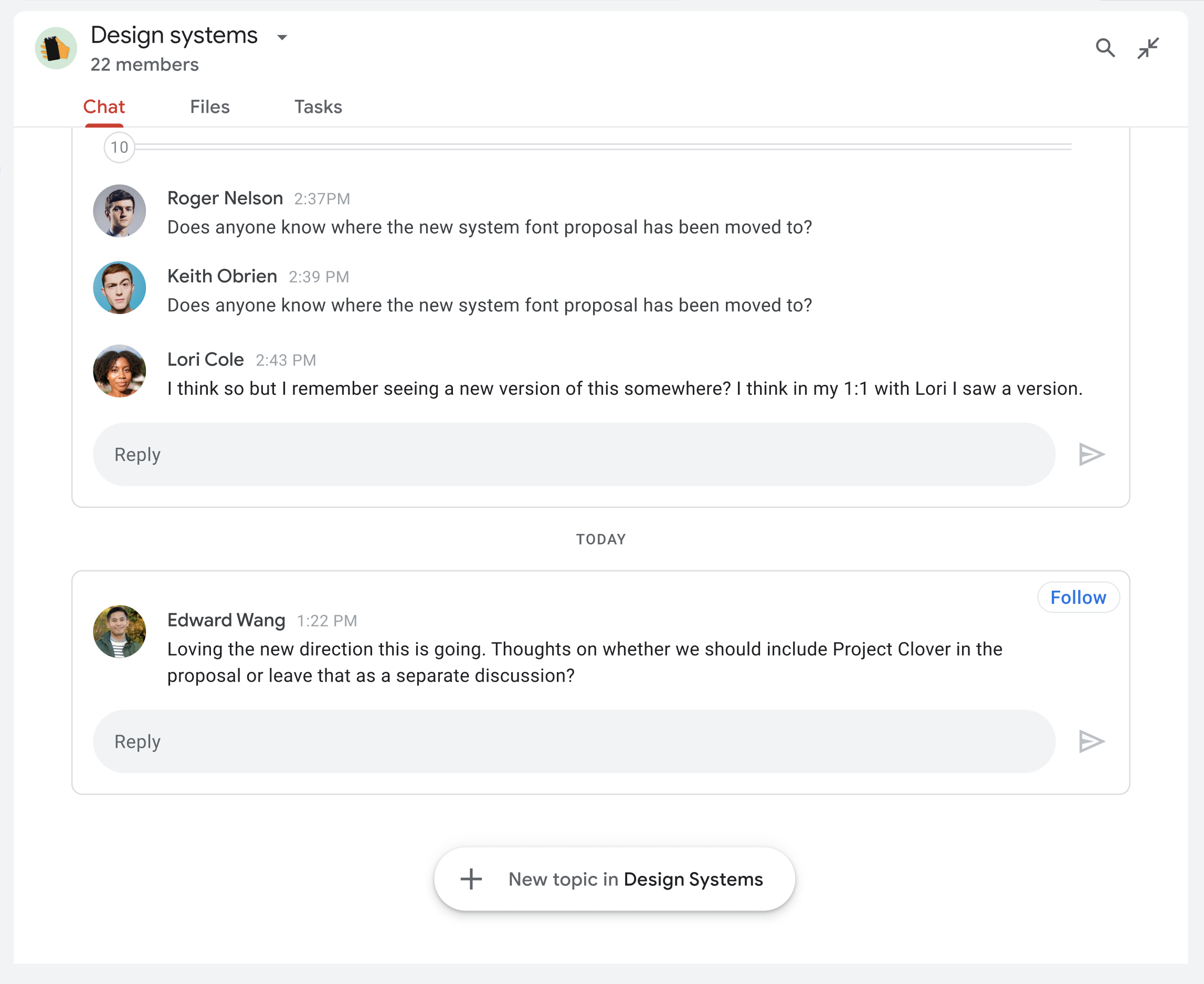
You can identify which type of space you are in by the location of the compose box. In-line threaded spaces have a single compose box at the bottom of the space. Spaces organized by topic instead have a + New topic button at the bottom of the space, while each topic has its own compose box.
A space with in-line threading
A space organized by conversation topic
Starting with this rollout, newly created spaces will feature in-line threading by default. Until early 2023, you can change this to spaces organized by conversation topic from the creation menu under “Advanced Settings”. Once a space is configured, it cannot be changed.
Beginning in early 2023, the option to create spaces organized by conversation topic will be removed, and in-line threading will be the standard for all new spaces. Existing spaces will not be impacted. We will share more information on the Workspace Updates Blog when that change begins rolling out.
Posted by Avi Singh, Research Scientist, and Laura Graesser, Research Engineer, Robotics at Google
Robot learning has been applied to a wide range of challenging real world tasks, including dexterous manipulation, legged locomotion, and grasping. It is less common to see robot learning applied to dynamic, high-acceleration tasks requiring tight-loop human-robot interactions, such as table tennis. There are two complementary properties of the table tennis task that make it interesting for robotic learning research. First, the task requires both speed and precision, which puts significant demands on a learning algorithm. At the same time, the problem is highly-structured (with a fixed, predictable environment) and naturally multi-agent (the robot can play with humans or another robot), making it a desirable testbed to investigate questions about human-robot interaction and reinforcement learning. These properties have led to several research groups developing table tennis research platforms [1, 2, 3, 4].
The Robotics team at Google has built such a platform to study problems that arise from robotic learning in a multi-player, dynamic and interactive setting. In the rest of this post we introduce two projects, Iterative-Sim2Real (to be presented at CoRL 2022) and GoalsEye (IROS 2022), which illustrate the problems we have been investigating so far. Iterative-Sim2Real enables a robot to hold rallies of over 300 hits with a human player, while GoalsEye enables learning goal-conditioned policies that match the precision of amateur humans.
Iterative-Sim2Real policies playing cooperatively with humans (top) and a GoalsEye policy returning balls to different locations (bottom).
Iterative-Sim2Real: Leveraging a Simulator to Play Cooperatively with Humans In this project, the goal for the robot is cooperative in nature: to carry out a rally with a human for as long as possible. Since it would be tedious and time-consuming to train directly against a human player in the real world, we adopt a simulation-based (i.e., sim-to-real) approach. However, because it is difficult to simulate human behavior accurately, applying sim-to-real learning to tasks that require tight, close-loop interaction with a human participant is difficult.
In Iterative-Sim2Real, (i.e., i-S2R), we present a method for learning human behavior models for human-robot interaction tasks, and instantiate it on our robotic table tennis platform. We have built a system that can achieve rallies of up to 340 hits with an amateur human player (shown below).
A 340-hit rally lasting over 4 minutes.
Learning Human Behavior Models: a Chicken and Egg Problem The central problem in learning accurate human behavior models for robotics is the following: if we do not have a good-enough robot policy to begin with, then we cannot collect high-quality data on how a person might interact with the robot. But without a human behavior model, we cannot obtain robot policies in the first place. An alternative would be to train a robot policy directly in the real world, but this is often slow, cost-prohibitive, and poses safety-related challenges, which are further exacerbated when people are involved. i-S2R, visualized below, is a solution to this chicken and egg problem. It uses a simple model of human behavior as an approximate starting point and alternates between training in simulation and deploying in the real world. In each iteration, both the human behavior model and the policy are refined.
i-S2R Methodology.
Results To evaluate i-S2R, we repeated the training process five times with five different human opponents and compared it with a baseline approach of ordinary sim-to-real plus fine-tuning (S2R+FT). When aggregated across all players, the i-S2R rally length is higher than S2R+FT by about 9% (below on the left). The histogram of rally lengths for i-S2R and S2R+FT (below on the right) shows that a large fraction of the rallies for S2R+FT are shorter (i.e., less than 5), while i-S2R achieves longer rallies more frequently.
Summary of i-S2R results. Boxplot details: The white circle is the mean, the horizontal line is the median, box bounds are the 25th and 75th percentiles.
We also break down the results based on player type: beginner (40% players), intermediate (40% of players) and advanced (20% players). We see that i-S2R significantly outperforms S2R+FT for both beginner and intermediate players (80% of players).
i-S2R Results by player type.
More details on i-S2R can be found on our preprint, website, and also in the following summary video.
GoalsEye: Learning to Return Balls Precisely on a Physical Robot While we focused on sim-to-real learning in i-S2R, it is sometimes desirable to learn using only real-world data — closing the sim-to-real gap in this case is unnecessary. Imitation learning (IL) provides a simple and stable approach to learning in the real world, but it requires access to demonstrations and cannot exceed the performance of the teacher. Collecting expert human demonstrations of precise goal-targeting in high speed settings is challenging and sometimes impossible (due to limited precision in human movements). While reinforcement learning (RL) is well-suited to such high-speed, high-precision tasks, it faces a difficult exploration problem (especially at the start), and can be very sample inefficient. In GoalsEye, we demonstrate an approach that combines recent behavior cloning techniques [5, 6] to learn a precise goal-targeting policy, starting from a small, weakly-structured, non-targeting dataset.
Here we consider a different table tennis task with an emphasis on precision. We want the robot to return the ball to an arbitrary goal location on the table, e.g. “hit the back left corner" or ''land the ball just over the net on the right side" (see left video below). Further, we wanted to find a method that can be applied directly on our real world table tennis environment with no simulation involved. We found that the synthesis of two existing imitation learning techniques, Learning from Play (LFP) and Goal-Conditioned Supervised Learning (GCSL), scales to this setting. It is safe and sample efficient enough to train a policy on a physical robot which is as accurate as amateur humans at the task of returning balls to specific goals on the table.
GoalsEye policy aiming at a 20cm diameter goal (left). Human player aiming at the same goal (right).
The essential ingredients of success are:
A minimal, but non-goal-directed “bootstrap” datasetof the robot hitting the ball to overcome an initial difficult exploration problem.
Hindsight relabeled goal conditioned behavioral cloning (GCBC) to train a goal-directed policy to reach any goal in the dataset.
Iterative self-supervised goal reaching. The agent improves continuously by setting random goals and attempting to reach them using the current policy. All attempts are relabeled and added into a continuously expanding training set. This self-practice, in which the robot expands the training data by setting and attempting to reach goals, is repeated iteratively.
GoalsEye methodology.
Demonstrations and Self-Improvement Through Practice Are Key The synthesis of techniques is crucial. The policy’s objective is to return a variety of incoming balls to any location on the opponent’s side of the table. A policy trained on the initial 2,480 demonstrations only accurately reaches within 30 cm of the goal 9% of the time. However, after a policy has self-practiced for ~13,500 attempts, goal-reaching accuracy rises to 43% (below on the right). This improvement is clearly visible as shown in the videos below. Yet if a policy only self-practices, training fails completely in this setting. Interestingly, the number of demonstrations improves the efficiency of subsequent self-practice, albeit with diminishing returns. This indicates that demonstration data and self-practice could be substituted depending on the relative time and cost to gather demonstration data compared with self-practice.
Self-practice substantially improves accuracy. Left: simulated training. Right: real robot training. The demonstration datasets contain ~2,500 episodes, both in simulation and the real world.
Visualizing the benefits of self-practice. Left: policy trained on initial 2,480 demonstrations. Right: policy after an additional 13,500 self-practice attempts.
More details on GoalsEye can be found in the preprint and on our website.
Conclusion and Future Work We have presented two complementary projects using our robotic table tennis research platform. i-S2R learns RL policies that are able to interact with humans, while GoalsEye demonstrates that learning from real-world unstructured data combined with self-supervised practice is effective for learning goal-conditioned policies in a precise, dynamic setting.
One interesting research direction to pursue on the table tennis platform would be to build a robot “coach” that could adapt its play style according to the skill level of the human participant to keep things challenging and exciting.
Acknowledgements We thank our co-authors, Saminda Abeyruwan, Alex Bewley, Krzysztof Choromanski, David B. D’Ambrosio, Tianli Ding, Deepali Jain, Corey Lynch, Pannag R. Sanketi, Pierre Sermanet and Anish Shankar. We are also grateful for the support of many members of the Robotics Team who are listed in the acknowledgement sections of the papers.
Tablets let you browse the web at home or on the go, whether you’re shopping for a new TV or finishing up some work. With the next release of Chrome on Android, we make it easier to navigate between tabs and get work done faster on your tablets.
Here’s a closer look at the latest Chrome updates available now on all Android tablets, and on the new Pixel Tablet, when it launches next year.
Easily find the tab you’re looking for
It can sometimes be challenging to grab the right tab on a smaller screen, especially when you have a bunch of tabs open. That’s why we added a new side-by-side design that makes finding the right tab easier in Chrome. If you’re switching back and forth between two tabs, the auto-scroll back feature can help you swipe back to your previous tab. And to help prevent you from accidentally closing tabs in the first place, we’ll hide the close button when tabs become too small. If you close a tab you didn’t intend to, one-step restore can get you right back to where you were.
View your tabs through the visual tab grid
If you constantly have lots of open tabs, the visual tab grid is perfect for you. Instead of searching through all your tabs in one single horizontal stream, tabs are shown in a grid, with a preview that helps you navigate with fewer taps. Visual tabs also help if you have a foldable device, because the smaller, folded screen on the outside matches the bigger screen on the inside of your tablet.
Drag and drop out of Chrome
To help you share and save content while you browse, you can now easily drag images, text and links that spark your interest from Chrome and drop them into another app like Gmail, Photos or Keep.
Easily browse in desktop mode
Sometimes, a website on a tablet just doesn't feel the same as it does on your computer. If a website isn’t working the way it should on your tablet or you just prefer the desktop experience, you can set Chrome to always request and display the desktop version of the site. This may give you capabilities that are currently only found on the desktop version, like certain menus and buttons.
Use tab groups on your tablet
If you use Chrome on your computer, you probably already know how convenient tab groups are. Keep an eye out — tab groups are coming soon to Chrome on Android tablets. You'll be able to stay organized by grouping related tabs together so you can better focus on one task without seeing the clutter from other open tabs.
No matter if you prefer using a mouse, a stylus or your finger, the Chrome on Android experience should be as intuitive and familiar on tablets as on your computer or phone. We're constantly exploring new ways to make it easier and more enjoyable to use Chrome on your Android tablet — whether it’s easier navigation with the visual tab grid, switching to desktop mode or finding the tab quickly.
In April 2022, we announced a new set of tools for managing storage across your organization. These tools give our customers additional insights and control to manage storage usage across users, groups, and their entire organization. To further enhance this experience, we’re rolling out:
A new Storage Admin role
The ability to apply storage limits to shared drives (coming soon)
A new column called Shared drive ID in the Manage Shared Drives page (coming soon)
See below for more information.
Who’s impacted
Admins
Why it's important
Super admins can use the new “Storage Admin” role to delegate access to the storage management tools, which will allow these admins to view and manage their storage usage. The new Storage Admin role will be rolling out over the next several days. As an admin, you can delegate a new Storage Admin in the admin console by navigating here.
In the coming months, admins will be able to apply a storage limit policy to shared drives within a company or an organizational unit. This new functionality will further help admins configure and manage storage settings that best fit the needs of their organization. In addition, admins will be able to uniquely identify a shared drive using the Shared drive ID. We’ll provide an update on the Workspace Updates Blog when this functionality becomes available.
Back in 2018, the team at Google working on Knative needed a faster way to iterate on Kubernetes controllers. They created a new tool dedicated to deploying Go applications to Kubernetes without having to worry about container images. That tool has proven to be indispensable to the Knative community, so in March 2019, Google released it as a stand-alone open source project named ko.
Since then, ko has gained in popularity as a simple, fast, and secure container image builder for Go applications. More recently, the ko community has added, amongst many other features, multi-platform support and automatic SBOM generation. Today, like the original team at Google, many open source and enterprise development teams depend on ko to improve their developer productivity. The ko project is also increasingly used as a solution for a number of build use-cases, and is being integrated into a variety of third party CI/CD tools.
At Google, we believe that using open source comes with a responsibility to contribute, sustain, and improve the projects that make our ecosystem better. To support the next phase of community-driven innovation, enable net-new adoption patterns, and to further raise the bar in the container tool industry, we are excited to announce today that we have submitted ko as a sandbox project to the Cloud Native Computing Foundation (CNCF).
This step begins the process of transferring the ko trademark, IP, and code to CNCF. We are excited to see how the broader open source community will continue innovating with ko.
By Mark Chmarny – Google Open Source Programs Office
Guess who’s coming to the internet this fall? .Boo, that’s who! Starting November 8, you’ll be able to register this new secure top-level domain from Google Registry. To give you a sneak peek of how you can use the .boo domain, we’ve rounded up five examples of websites already using .boo — whether it’s spooky or romantic.
Halloween.boo: Party City just launched Halloween.boo to celebrate their biggest holiday of the year – Halloween! Visit their one-stop shop for costumes, decorations, balloons and more for your next Halloween Party.
Treats.boo: Halloween and the holidays make it the season for sweets. Zolli Candy makes zero-sugar, allergy-friendly, gluten-free, vegan and keto treats for those with dietary restrictions or who just want a healthier option.
Ta.boo: Taboo, a founding member of the Black Eyed Peas, is a dancer, actor, author, and philanthropist. He’ll be launching his website soon at ta.boo and I’ve got a feeling it’ll be great.
Boo.boo: Don’t let boo boos get in the way of your plans. Visit boo.boo to find the right BAND-AID® Brand product for every ouch, oops and uh-oh.
Meetyour.boo - Ready for sweater weather? Coffee Meets Bagel, a dating app for serious daters, can help you find your boo to snuggle up with.
Starting November 8, you can register your own .boo domain name as part of our Early Access Program for an additional one-time fee. This fee decreases daily until November 15. On November 15, .boo domains will become publicly available at a base annual price through your registrar of choice. To learn more about pricing and our participating partners, visit hey.boo.
Welcome to our new advice series, Help Me Out, where we ask expert Googlers to share their best tips for navigating common tech conundrums. Whether you're trying to achieve inbox zero or want to get a handle on all those Chrome tabs, we've got a Googler who can help you out.
Help me out!
I come to you in need of Chrome tabs tips. First, you should know that Ilove my Chrome tabs. Exhibit A: I apparently have 42 Chrome tabs open on my work laptop right now. Exhibit B: Rumor has it I have 83 additional Chrome tabs open on my personal laptop. You could say closing my tabs feels…taboo.
There’s just so much internet to explore — so many fascinating rabbit holes to fall down with a simple search. Sometimes I’ll bookmark all open tabs into folders that are too vaguely named to be useful. What differentiates “New Folder 1” from “New Folder 2?” No one can say. I’m never going to give up my tabs, but I definitely could use some tidying tips.
—Keepin' tabs on my tabs
Dear Keepin’ tabs on my tabs,
Coming to you live from a tab that’s buried amongst its kind! I confess that I, too, am a tab enthusiast. Since I’ve got the same issue, I decided to ask a Chrome expert to help me help you.
Edward Jung is a UX engineer who works on the Chrome team and describes himself as a “tabs maximalist.” “I’m using an extension right now that tells me I have 250 tabs open,” he says. The difference between us and Edward? He’s got a solid tabs organization system on his side. Edward says in the 12 or so years he’s been working at Google, he’s come up with various strategies to cope with his tabs use. And his tips can help us, too.
First, something that’s helpful to know if you accidentally close tabs: You can always restore them (although Edward says whenever this happens he takes it as a sign from the universe that it’s time to let those tabs go and start over!).
But that doesn’t quite solve your specific issue about organization. For starters, Edward suggests usingTab Groups. “I helped design Chrome Tab Groups because tab organization was a problem I was experiencing,” he says. This feature allows you to group various tabs together, so if you want to open a handful of tabs all at once related to a subject in particular, a project you’re working on or even something like a trip you’re planning, you just need to find that label and everything will open simultaneously. Plus, after grouping, the tabs collapse together, keeping your tab strip less cluttered. You can even add color-coding or use an emoji when you’re naming a Tab Group, which helps you immediately identify it.
Right click a tab and select “Add tab to new group” to find grouping options, including color-coding.
If you have multiple windows full of tabs, a great way to instantly recognize which tabs are in which windows is to use Chrome’s window naming feature; you can access this by right-clicking on the empty space in the tab strip and selecting “name window.” “So if you have a window open that has various tabs related to ‘project x,’ you can name the window ‘project x.’ That way you don’t have to remember what a tab was related to, and in your toolbar you’ll see the label, not the name of some random website or document,” Edward explains.
Right-clicking on the empty space at the top of your browser window will give you the option to name a window.
Now that you’ve got a way to organize and identify your many tabs, you still need a way to search them. Edward says there’s a method for that, too: You simply hit the little “down” arrow at the top right of your Chrome browser and type in what you’re looking for, or scroll down the list of what’s open. If you have too many tabs open, you can close some right from this list. Another incredibly easy way to search your tabs? Start typing whatever it is you’re looking for into the URL bar — you don’t need the complete phrase either; if it's a tab you’ve used recently or often, Chrome will fill in the rest. And if you already have the tab open somewhere, Chrome will prompt you to switch to that one instead of opening a duplicate.
Can't find a tab? Cut to the chase by clicking on this arrow and searching for it directly.
Hopefully this helps you organize your tabs better! I’ll leave you with this excellent metaphor from Edward, who likens good tab organization to a utensils drawer. “Youcould just throw everything in a drawer, but it would be chaos! This is like using the organizers so everything has a recognized place, and you easily know where to find what, right when you look at it.”
The use of on-device ML in Android is growing faster than ever thanks to its unique benefits over server based ML such as offline availability, lower latency, improved privacy and lower inference costs.
When building on-device ML based features, Android developers usually have a choice between two options: using a production ready SDK that comes with pre-trained and optimized ML models, such as ML Kit or, if they need more control, deploying their own custom ML models and features.
Today, we have some updates on Android’s custom ML stack - a set of essential APIs and services for deploying custom ML features on Android.
TensorFlow Lite in Google Play services is now Android’s official ML inference engine
We first announced TensorFlow Lite in Google Play services in Early Access Preview at Google I/O '21 as an alternative to standalone TensorFlow Lite. Since then, it has grown to serve billions of users every month via tens of thousands of apps.Last month we released the stable version of TensorFlow Lite in Google Play services and are excited to make it the official ML inference engine on Android.
Using TensorFlow Lite in Google Play services will not only allow you to save on binary size and benefit from performance improvements via automatic updates but also ensure that you can easily integrate with future APIs and services from Android’s custom ML stack as they will be built on top of our official inference engine.
If you are currently bundling TensorFlow Lite to your app, check out the documentation to migrate.
TensorFlow Lite Delegates now distributed via Google Play services
Released a few years ago, GPU delegate and NNAPI delegate let you leverage the processing power of specialized hardware such as GPU, DSP or NPU. Both GPU and NNAPI delegates are now distributed via Google Play services.
We are also aware that, for advanced use cases, some developers want to use custom delegates directly. We’re working with our hardware partners on expanding access to their custom delegates via Google Play services.
Acceleration Service will help you pick the best TensorFlow Lite Delegate for optimal performance in runtime
Identifying the best delegate for each user can be a complex task on Android due to hardware heterogeneity. To help you overcome this challenge, we are building a new API that allows you to safely optimize the hardware acceleration configuration at runtime for your TensorFlow Lite models.
You can now split table cells into a desired number of rows and columns in Google Docs. For example, you can create subheading cells by splitting the cell under a heading cell into two columns. We hope this highly requested feature improves upon your ability to organize information with tables in Docs.
Getting started
Admins: There is no admin control for this feature.
End users: To split cells, open a Doc > right-click the cell > click Split cell > enter the number of rows and columns you want > click Split. Visit the Help Center to learn more about adding and editing tables.
Rollout pace
Rapid Release domains: Gradual rollout (up to 15 days for feature visibility) starting on October 17, 2022
Scheduled Release domains: Gradual rollout (up to 15 days for feature visibility) starting on October 31, 2022
Availability
Available to all Google Workspace customers, as well as legacy G Suite Basic and Business customers