by amanda casari & Mike Bufano, Google Open Source

Collaboration with the Eclipse Foundation will support open infrastructure for AI-integrated developer platforms like Google Antigravity, while advancing broader open source security and regulatory compliance initiatives
As of April 2026, Google has joined the Eclipse Foundation as a Strategic Member, reflecting the company's continued investment in open source technologies and modern developer infrastructure.
As part of this collaboration, Google will additionally sponsor Open VSX and is among the first adopters of the recently announced Open VSX Managed Registry service. Open VSX is the open source, vendor-neutral extension registry for tools built on the VS Code™ extension API. It powers a rapidly growing ecosystem of AI-integrated IDEs, cloud development environments, and developer platforms, including Google Antigravity, AWS's Kiro, Cursor, and, Windsurf among many others.
As a Strategic Member, Google will participate in the Eclipse Foundation's Board of Directors and Technical Advisory Council, helping guide the technical and strategic direction of one of the world's leading open source software foundations.
"The industry is feeling the massive turning point as AI continues to change how developers write, deploy, and maintain software," said amanda casari of Google's Open Source Programs Office and new Eclipse Board member. "Joining The Eclipse Foundation as a Strategic Member ensures that the next generation of AI-integrated developer experiences—including platforms like Google Antigravity—are built in partnership with transparent, vendor-neutral foundations. Open registries, like Open VSX, are critical infrastructure which keep the global developer ecosystem open to everyone."
Google and the Eclipse Foundation share a deep history, having collaborated across numerous initiatives since 2006. This Strategic Membership elevates the relationship and support critical to modern initiatives like Open VSX, Open Regulatory Compliance (ORC), and Adoptium.
"Google has played a pivotal role in open source innovation for two decades," said Mike Milinkovich, Executive Director of the Eclipse Foundation. "Their decision to join as a Strategic Member reflects the growing importance of open collaboration in supporting global regulatory compliance efforts, strengthening open source infrastructure, securing supply chains, and advancing the next generation of AI-integrated developer platforms."
The Eclipse Foundation continues to see explosive growth as adoption accelerates across AI-integrated developer tooling and cloud development environments. The Open VSX registry now scales to meet massive global demand:
- 300 million+ downloads per month
- 200 million requests during peak daily traffic
- 12,000+ hosted extensions from over 8,000 publishers.
 An overview of DiffusionGemma, an exceptionally fast text generation model with up to 4x faster speeds.
An overview of DiffusionGemma, an exceptionally fast text generation model with up to 4x faster speeds.
 Google is rolling out many of Chrome's latest AI features in Latin America, Africa, the Middle East and more.
Google is rolling out many of Chrome's latest AI features in Latin America, Africa, the Middle East and more.
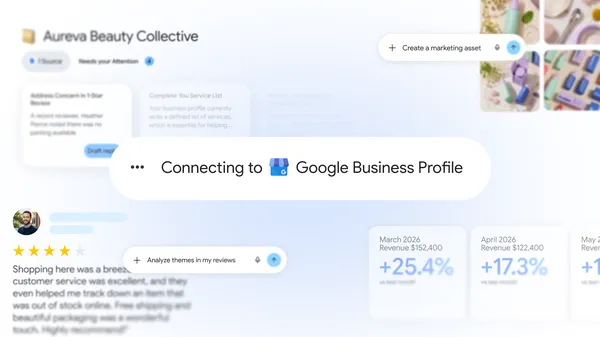 An overview of new features in the Gemini app designed specifically to support businesses and entrepreneurs.
An overview of new features in the Gemini app designed specifically to support businesses and entrepreneurs.