Posted by Maarten Bosma, Research Engineer and Jason Wei, AI Resident, Google Research
For a machine learning model to generate meaningful text, it must have a large amount of knowledge about the world as well as the ability to abstract. While language models that are trained to do this are increasingly able to automatically acquire this knowledge as they scale, how to best unlock this knowledge and apply it to specific real-world tasks is not clear.
One well-established technique for doing this is called fine-tuning, which is training a pretrained model such as BERT and T5 on a labeled dataset to adapt it to a downstream task. However, fine-tuning requires a large number of training examples, along with stored model weights for each downstream task, which is not always practical, particularly for large models.
In “Fine-tuned Language Models Are Zero-Shot Learners”, we explore a simple technique calledinstruction fine-tuning, or instruction tuning for short. This involves fine-tuning a model not to solve a specific task, but to make it more amenable to solving NLP tasks in general. We use instruction tuning to train a model, which we call Fine-tuned LAnguage Net (FLAN). Because the instruction tuning phase of FLAN only takes a small number of updates compared to the large amount of computation involved in pre-training the model, it's the metaphorical dessert to the main course of pretraining. This enables FLAN to perform various unseen tasks.
An illustration of how FLAN works: The model is fine-tuned on disparate sets of instructions and generalizes to unseen instructions. As more types of tasks are added to the fine-tuning data model performance improves.
Background One recent popular technique for using language models to solve tasks is called zero-shot or few-shot prompting. This technique formulates a task based on text that a language model might have seen during training, where then the language model generates the answer by completing the text. For instance, to classify the sentiment of a movie review, a language model might be given the sentence, “The movie review ‘best RomCom since Pretty Woman’ is _” and be asked to complete the sentence with either the word “positive” or “negative”.
Although this technique demonstrates good performance for some tasks, it requires careful prompt engineering to design tasks to look like data that the model has seen during training — an approach that performs well on some but not all tasks and also can be an unintuitive way for practitioners to interact with the model. For example, the creators of GPT-3 (one of the largest language models in use today) found that such prompting techniques did not result in good performance on natural language inference (NLI) tasks
Instruction Tuning FLAN instead fine-tunes the model on a large set of varied instructions that use a simple and intuitive description of the task, such as “Classify this movie review as positive or negative,” or “Translate this sentence to Danish.”
Creating a dataset of instructions from scratch to fine-tune the model would take a considerable amount of resources. Therefore, we instead make use of templates to transform existing datasets into an instructional format.
Example templates for a natural language inference dataset.
We show that by training a model on these instructions it not only becomes good at solving the kinds of instructions it has seen during training but becomes good at following instructions in general.
Evaluating the Model To compare FLAN against other techniques in a meaningful way, we used established benchmark datasets to compare the performance of our model with existing models. Also, we evaluated how FLAN performs without having seen any examples from that dataset during training.
However, if we trained on datasets that were too similar to an evaluation dataset, that might still skew the performance results. For example, training on one question-answering dataset might help the model do better on another question-answering dataset. Because of this, we group all datasets into clusters by type of task and hold out not just the training data for the dataset, but the entire task cluster to which the dataset belongs.
We grouped our datasets into the clusters below.
Results We evaluated FLAN on 25 tasks and found that it improves over zero-shot prompting on all but four of them. We found that our results are better than zero-shot GPT-3 on 20 of 25 tasks, and better than even few-shot GPT-3 on some tasks.
For various models, we show the average accuracy over all datasets in a task cluster. Natural language inference datasets: ANLI R1–R3, CB, and RTE. Reading comprehension datasets: BoolQ, MultiRC, OpenbookQA. Closed-book QA datasets: ARC, NQ, TriviaQA.
We also find that model scale is very important for the ability of the model to benefit from instruction tuning. At smaller scales, the FLAN technique actually degrades performance, and only at larger scales does the model become able to generalize from instructions in the training data to unseen tasks. This might be because models that are too small do not have enough parameters to perform a large number of tasks.
Instruction tuning only improves performance on unseen tasks for models of certain size.
Conclusion The FLAN model is not the first to train on a set of instructions, but to our knowledge we are the first to apply this technique at scale and show that it can improve the generalization ability of the model. We hope that the method we presented will help inspire more research into models that can perform unseen tasks and learn from very little data.
We also released the code to perform the transformations so that other researchers can reproduce our results and build on them.
Acknowledgements We thank our collaborators Vincent Y. Zhao, Kelvin Guu, Adams Wei Yu, Brian Lester, Nan Du, Andrew M. Dai, and Quoc V. Le at Google Research.
Daniel Ho, Software Engineer, The Everyday Robot Project and Kanishka Rao, Staff Software Engineer, Robotics at Google
Reinforcement and imitation learning methods in robotics research can enable autonomous environmental navigation and efficient object manipulation, which in turn opens up a breadth of useful real-life applications. Previous work has demonstrated how robots that learn end-to-end using deep neural networks can reliably and safely interact with the unstructured world around us by comprehending camera observations to take actions and solve tasks. However, while end-to-end learning methods can generalize and scale for complicated robot manipulation tasks, they require hundreds of thousands real world robot training episodes, which can be difficult to obtain. One can attempt to alleviate this constraint by using a simulation of the environment that allows virtual robots to learn more quickly and at scale, but the simulations’ inability to exactly match the real world presents a challenge c ommonly referred to as the sim-to-real gap. One important source of the gap comes from discrepancies between the images rendered in simulation and the real robot camera observations, which then causes the robot to perform poorly in the real world.
To-date, work on bridging this gap has employed a technique called pixel-level domain adaptation, which translates synthetic images to realistic ones at the pixel level. One example of this technique is GraspGAN, which employs a generative adversarial network (GAN), a framework that has been very effective at image generation, to model this transformation between simulated and real images given datasets of each domain. These pseudo-real images correct some sim-to-real gap, so policies learned with simulation execute more successfully on real robots. A limitation for their use in sim-to-real transfer, however, is that because GANs translate images at the pixel-level, multi-pixel features or structures that are necessary for robot task learning may be arbitrarily modified or even removed.
To address the above limitation, and in collaboration with the Everyday Robot Project at X, we introduce two works, RL-CycleGAN and RetinaGAN, that train GANs with robot-specific consistencies — so that they do not arbitrarily modify visual features that are specifically necessary for robot task learning — and thus bridge the visual discrepancy between sim and real. We demonstrate how these consistencies preserve features critical to policy learning, eliminating the need for hand-engineered, task-specific tuning, which in turn allows for this sim-to-real methodology to work flexibly across tasks, domains, and learning algorithms. With RL-CycleGAN, we describe our sim-to-real transfer methodology and demonstrate state-of-the-art performance on real world grasping tasks trained with RL. With RetinaGAN, we extend our approach to include imitation learning with a door opening task.
RL-CycleGAN In “RL-CycleGAN: Reinforcement Learning Aware Simulation-To-Real”, we leverage a variation of CycleGAN for sim-to-real adaptation by ensuring consistency of task-relevant features between real and simulated images. CycleGAN encourages preservation of image contents by ensuring an adapted image transformed back to the original domain is identical to the original image, which is called cycle consistency. To further encourage the adapted images to be useful for robotics, the CycleGAN is jointly trained with a reinforcement learning (RL) robot agent that ensures the robot’s actions are the same given both the original images and those after GAN-adaptation. That is, task-specific features like robot arm or graspable object locations are unaltered, but the GAN may still alter lighting or textural differences between domains that do not affect task-level decisions.
Evaluating RL-CycleGAN We evaluated RL-CycleGAN on a robotic indiscriminate grasping task. Trained on 580,000 real trials and simulations adapted with RL-CycleGAN, the robot grasps objects with 94% success, surpassing the 89% success rate of the prior state-of-the-art sim-to-real method GraspGAN and the 87% mark using real-only data without simulation. With only 28,000 trials, the RL-CycleGAN method reaches 86%, comparable to the previous baselines with 20x the data. Some examples of the RL-CycleGAN output alongside the simulation images are shown below.
Comparison between simulation images of robot grasping before (left) and after RL-CycleGAN translation (right).
RetinaGAN While RL-CycleGAN reliably transfers from sim-to-real for the RL domain using task awareness, a natural question arises: can we develop a more flexible sim-to-real transfer technique that applies broadly to different tasks and robot learning techniques?
In “RetinaGAN: An Object-Aware Approach to Sim-to-Real Transfer”, presented at ICRA 2021, we develop such a task-decoupled, algorithm-decoupled GAN approach to sim-to-real transfer by instead focusing on robots’ perception of objects. RetinaGAN enforces strong object-semantic awareness through perception consistency via object detection to predict bounding box locations for all objects on all images. In an ideal sim-to-real model, we expect the object detector to predict the same box locations before and after GAN translation, as objects should not change structurally. RetinaGAN is trained toward this ideal by backpropagation, such that there is consistency in perception of objects both when a) simulated images are transformed from simulation to real and then back to simulation and b) when real images are transformed from real to simulation and then back to real. We find this object-based consistency to be more widely applicable than the task-specific consistency required by RL-CycleGAN.
Diagram of RetinaGAN stages. The simulated image (top left) is transformed by the sim-to-real generator and subsequently by the real-to-sim generator. The real image (bottom left) undergoes the transformation in reverse order. Having separate pipelines that start with the simulated and real images improves the GAN’s performance.
Evaluating RetinaGAN on a Real Robot Given the goal of building a more flexible sim-to-real transfer technique, we evaluate RetinaGAN in multiple ways to understand for which tasks and under what conditions it accomplishes sim-to-real transfer.
We first apply RetinaGAN to a grasping task. As demonstrated visually below, RetinaGAN emphasizes the translation of realistic object textures, shadows, and lighting, while maintaining the visual quality and saliency of the graspable objects. We couple a pre-trained RetinaGAN model with the distributed reinforcement learning method Q2-Opt to train a vision-based task model for instance grasping. On real robots, this policy grasps object instances with 80% success when trained on a hundred thousand episodes — outperforming prior adaptation methods RL-CycleGAN and CycleGAN (both achieving ~68%) and training without domain adaptation (grey bars below: 19% with sim data, 22% with real data, and 54% with mixed data). This gives us confidence that perception consistency is a valuable strategy for sim-to-real transfer. Further, with just 10,000 training episodes (8% of the data), the RL policy with RetinaGAN grasps with 66% success, demonstrating performance of prior methods with significantly less data.
Evaluation performance of RL policies on instance grasping, trained with various datasets and sim-to-real methods. Low-Data RetinaGAN uses 8% of the real dataset.
The simulated grasping environment (left) is translated to a realistic image (right) using RetinaGAN.
Next, we pair RetinaGAN with a different learning method, behavioral cloning, to open conference room doors given demonstrations by human operators. Using images from both simulated and real demonstrations, we train RetinaGAN to translate the synthetic images to look realistic, bridging the sim-to-real gap. We then train a behavior cloning model to imitate the task-solving actions of the human operators within real and RetinaGAN-adapted sim demonstrations. When evaluating this model by predicting actions to take, the robot enters real conference rooms over 93% of the time, surpassing baselines of 75% and below.
Both of the above images show the same simulation, but RetinaGAN translates simulated door opening images (left) to look more like real robot sensor data (right).
Three examples of the real robot successfully opening conference room doors using the RetinaGAN-trained behavior cloning policy.
Conclusion This work has demonstrated how additional constraints on GANs may address the visual sim-to-real gap without requiring task-specific tuning; these approaches reach higher real robot success rates with less data collection. RL-CycleGAN translates synthetic images to realistic ones with an RL-consistency loss that automatically preserves task-relevant features. RetinaGAN is an object-aware sim-to-real adaptation technique that transfers robustly across environments and tasks, agnostic to the task learning method. Since RetinaGAN is not trained with any task-specific knowledge, we show how it can be reused for a novel object pushing task. We hope that work on the sim-to-real gap further generalizes toward solving task-agnostic robotic manipulation in unstructured environments.
Acknowledgements Research into RL-CycleGAN was conducted by Kanishka Rao, Chris Harris, Alex Irpan, Sergey Levine, Julian Ibarz, and Mohi Khansari. Research into RetinaGAN was conducted by Daniel Ho, Kanishka Rao, Zhuo Xu, Eric Jang, Mohi Khansari, and Yunfei Bai. We’d also like to give special thanks to Ivonne Fajardo, Noah Brown, Benjamin Swanson, Christopher Paguyo, Armando Fuentes, and Sphurti More for overseeing the robot operations. We thank Paul Wohlhart, Konstantinos Bousmalis, Daniel Kappler, Alexander Herzog, Anthony Brohan, Yao Lu, Chad Richards, Vincent Vanhoucke, and Mrinal Kalakrishnan, Max Braun and others in the Robotics at Google team and the Everyday Robot Project for valuable discussions and help.
Posted by Jaqui Herman, Research Specialist and Tim Herrmann, Program Manager
The 9th International Conference on Learning Representations (ICLR 2021), a virtual conference focused on deep learning, kicked off this week, offering conference and workshop tracks that present some of the latest research in deep learning and its applications to areas such as computer vision, computational biology, speech recognition, text understanding, and more.
As a Platinum Sponsor of ICLR 2021, Google will have a strong presence with over 100 accepted publications and participation on organizing committees and in workshops. If you have registered for ICLR 2021, we hope you’ll watch our talks and learn about the work at Google that goes into solving interesting problems for billions of people. Learn more about our research being presented in the list below (Googlers in bold).
Officers and Board Members Includes: Hugo Larochelle, Tara Sainath
Organizing Committee Includes: Sanmi Koyejo, Chelsea Finn
Area Chairs Includes: Abhishek Kumar, Aditya Menon, Aleksandra Faust, Alexey Dosovitskiy, Andrew Cotter, Andrew Dai, Augustus Odena, Been Kim, Behnam Neyshabur, Ben Poole, Bo Dai, Bo Li, Branislav Kveton, Ce Liu, Claudio Gentile, Colin Raffel, Danny Tarlow, David Ha, Dengyong Zhou, Dumitru Erhan, Dustin Tran, Felix Hill, George Tucker, Hanie Sedghi, Heinrich Jiang, Hossein Mobahi, Izhak Shafran, Jascha Sohl-Dickstein, Jasper Snoek, Jean-Philippe Vert, Jeffrey Pennington, Justin Gilmer, Kevin Swersky, Marco Cuturi, Mario Lucic, Marlos C. Machado, Mathieu Blondel, Matt Johnson, Matthieu Geist, Mohammad Norouzi, Naman Agarwal, Navdeep Jaitly, Nicolas Le Roux, Niki Parmar, Olivier Bachem, Olivier Pietquin, Philip Long, Quentin Berthet, Razvan Pascanu, Rodolphe Jenatton, Samy Bengio*, Sebastian Nowozin, Silvio Lattanzi, Slav Petrov, Srinadh Bhojanapalli, Suman Ravuri, Tim Salimans, Vitaly Kuznetsov, William Cohen, Yann Dauphin, Yujia Li
Scalable Transfer Learning with Expert Models Joan Puigcerver, Carlos Riquelme Ruiz, Basil Mustafa, Cedric Renggli*, André Susano Pinto, Sylvain Gelly, Daniel Keysers, Neil Houlsby
Rethinking Attention with Performers (see the blog post) Krzysztof Marcin Choromanski, Valerii Likhosherstov, David Dohan, Xingyou Song, Andreea Gane, Tamas Sarlos, Peter Hawkins, Jared Quincy Davis, Afroz Mohiuddin, Lukasz Kaiser, David Benjamin Belanger, Lucy J Colwell, Adrian Weller
Teaching with Commentaries Aniruddh Raghu*, Maithra Raghu, Simon Kornblith, David Duvenaud, Geoffrey Hinton
Benchmarks for Deep Off-Policy Evaluation Justin Fu, Mohammad Norouzi, Ofir Nachum, George Tucker, Ziyu Wang, Alexander Novikov, Mengjiao Yang, Michael R Zhang, Yutian Chen, Aviral Kumar, Cosmin Paduraru, Sergey Levine, Thomas Paine
Workshops Science and Engineering of Deep Learning Speakers and Panelists include: Alex Hanna Moderator and Advisors include: Emily Denton Organizers include: Negar Rostemzadeh, Samy Bengio*
Enormous Language Models: Perspectives and Benchmarks Speakers and Panelists include: Noam Shazeer, Natalie Schluter Organizers include: Colin Raffel, Adam Roberts, Jascha Sohl-Dickstein, Katherine Lee, William Fedus, Aitor Lewkowycz
A Roadmap to Never-Ending RL Invited Session Panelists include: Aleksandra Faust Program Committee includes: Coline Devin, Karol Hausman, Ben Eysenbach, Ofir Nachum, Ryan Julian, Tianhe Yu, Dumitru Erhan, Marc Pickett, Shixiang Gu
Posted by Jaqui Herman, Research Specialist and Tim Herrmann, Program Manager
The 9th International Conference on Learning Representations (ICLR 2021), a virtual conference focused on deep learning, kicked off this week, offering conference and workshop tracks that present some of the latest research in deep learning and its applications to areas such as computer vision, computational biology, speech recognition, text understanding, and more.
As a Platinum Sponsor of ICLR 2021, Google will have a strong presence with over 100 accepted publications and participation on organizing committees and in workshops. If you have registered for ICLR 2021, we hope you’ll watch our talks and learn about the work at Google that goes into solving interesting problems for billions of people. Learn more about our research being presented in the list below (Googlers in bold).
Officers and Board Members Includes: Hugo Larochelle, Tara Sainath
Organizing Committee Includes: Sanmi Koyejo, Chelsea Finn
Area Chairs Includes: Abhishek Kumar, Aditya Menon, Aleksandra Faust, Alexey Dosovitskiy, Andrew Cotter, Andrew Dai, Augustus Odena, Been Kim, Behnam Neyshabur, Ben Poole, Bo Dai, Bo Li, Branislav Kveton, Ce Liu, Claudio Gentile, Colin Raffel, Danny Tarlow, David Ha, Dengyong Zhou, Dumitru Erhan, Dustin Tran, Felix Hill, George Tucker, Hanie Sedghi, Heinrich Jiang, Hossein Mobahi, Izhak Shafran, Jascha Sohl-Dickstein, Jasper Snoek, Jean-Philippe Vert, Jeffrey Pennington, Justin Gilmer, Kevin Swersky, Marco Cuturi, Mario Lucic, Marlos C. Machado, Mathieu Blondel, Matt Johnson, Matthieu Geist, Mohammad Norouzi, Naman Agarwal, Navdeep Jaitly, Nicolas Le Roux, Niki Parmar, Olivier Bachem, Olivier Pietquin, Philip Long, Quentin Berthet, Razvan Pascanu, Rodolphe Jenatton, Samy Bengio*, Sebastian Nowozin, Silvio Lattanzi, Slav Petrov, Srinadh Bhojanapalli, Suman Ravuri, Tim Salimans, Vitaly Kuznetsov, William Cohen, Yann Dauphin, Yujia Li
Scalable Transfer Learning with Expert Models Joan Puigcerver, Carlos Riquelme Ruiz, Basil Mustafa, Cedric Renggli*, André Susano Pinto, Sylvain Gelly, Daniel Keysers, Neil Houlsby
Rethinking Attention with Performers (see the blog post) Krzysztof Marcin Choromanski, Valerii Likhosherstov, David Dohan, Xingyou Song, Andreea Gane, Tamas Sarlos, Peter Hawkins, Jared Quincy Davis, Afroz Mohiuddin, Lukasz Kaiser, David Benjamin Belanger, Lucy J Colwell, Adrian Weller
Teaching with Commentaries Aniruddh Raghu*, Maithra Raghu, Simon Kornblith, David Duvenaud, Geoffrey Hinton
Benchmarks for Deep Off-Policy Evaluation Justin Fu, Mohammad Norouzi, Ofir Nachum, George Tucker, Ziyu Wang, Alexander Novikov, Mengjiao Yang, Michael R Zhang, Yutian Chen, Aviral Kumar, Cosmin Paduraru, Sergey Levine, Thomas Paine
Workshops Science and Engineering of Deep Learning Speakers and Panelists include: Alex Hanna Moderator and Advisors include: Emily Denton Organizers include: Negar Rostemzadeh, Samy Bengio*
Enormous Language Models: Perspectives and Benchmarks Speakers and Panelists include: Noam Shazeer, Natalie Schluter Organizers include: Colin Raffel, Adam Roberts, Jascha Sohl-Dickstein, Katherine Lee, William Fedus, Aitor Lewkowycz
A Roadmap to Never-Ending RL Invited Session Panelists include: Aleksandra Faust Program Committee includes: Coline Devin, Karol Hausman, Ben Eysenbach, Ofir Nachum, Ryan Julian, Tianhe Yu, Dumitru Erhan, Marc Pickett, Shixiang Gu
Posted by Cassidy Curtis, Visual Designer and David Salesin, Principal Scientist, Google Research
3D computer animation is a time-consuming and highly technical medium — to complete even a single animated scene requires numerous steps, like modeling, rigging and animating, each of which is itself a sub-discipline that can take years to master. Because of its complexity, 3D animation is generally practiced by teams of skilled specialists and is inaccessible to almost everyone else, despite decades of advances in technology and tools. With the recent development of tools that facilitate game character creation and game balance, a natural question arises: is it possible to democratize the 3D animation process so it’s accessible to everyone?
To explore this concept, we start with the observation that most forms of artistic expression have a casual mode: a classical guitarist might jam without any written music, a trained actor could ad-lib a line or two while rehearsing, and an oil painter can jot down a quick gesture drawing. What these casual modes have in common is that they allow an artist to express a complete thought quickly and intuitively without fear of making a mistake. This turns out to be essential to the creative process — when each sketch is nearly effortless, it is possible to iteratively explore the space of possibilities far more effectively.
In this post, we describe Monster Mash, an open source tool presented at SIGGRAPH Asia 2020 that allows experts and amateurs alike to create rich, expressive, deformable 3D models from scratch — and to animate them — all in a casual mode, without ever having to leave the 2D plane. With Monster Mash, the user sketches out a character, and the software automatically converts it to a soft, deformable 3D model that the user can immediately animate by grabbing parts of it and moving them around in real time. There is also an online demo, where you can try it out for yourself.
Creating a walk cycle using Monster Mash. Step 1: Draw a character. Step 2: Animate it.
Creating a 2D Sketch The insight that makes this casual sketching approach possible is that many 3D models, particularly those of organic forms, can be described by an ordered set of overlapping 2D regions. This abstraction makes the complex task of 3D modeling much easier: the user creates 2D regions by drawing their outlines, then the algorithm creates a 3D model by stitching the regions together and inflating them. The result is a simple and intuitive user interface for sketching 3D figures.
For example, suppose the user wants to create a 3D model of an elephant. The first step is to draw the body as a closed stroke (a). Then the user adds strokes to depict other body parts such as legs (b). Drawing those additional strokes as open curves provides a hint to the system that they are meant to be smoothly connected with the regions they overlap. The user can also specify that some new parts should go behind the existing ones by drawing them with the right mouse button (c), and mark other parts as symmetrical by double-clicking on them (d). The result is an ordered list of 2D regions.
Steps in creating a 2D sketch of an elephant.
Stitching and Inflation To understand how a 3D model is created from these 2D regions, let’s look more closely at one part of the elephant. First, the system identifies where the leg must be connected to the body (a) by finding the segment (red) that completes the open curve. The system cuts the body’s front surface along that segment, and then stitches the front of the leg together with the body (b). It then inflates the model into 3D by solving a modified form of Poisson’s equation to produce a surface with a rounded cross-section (c). The resulting model (d) is smooth and well-shaped, but because all of the 3D parts are rooted in the drawing plane, they may intersect each other, resulting in a somewhat odd-looking “elephant”. These intersections will be resolved by the deformation system.
Illustration of the details of the stitching and inflation process. The schematic illustrations (b, c) are cross-sections viewed from the elephant’s front.
Layered Deformation At this point we just have a static model — we need to give the user an easy way to pose the model, and also separate the intersecting parts somehow. Monster Mash’s layered deformation system, based on the well-known smooth deformation method as-rigid-as-possible (ARAP), solves both of these problems at once.What’s novel about our layered “ARAP-L” approach is that it combines deformation and other constraints into a single optimization framework, allowing these processes to run in parallel at interactive speed, so that the user can manipulate the model in real time.
The framework incorporates a set of layering and equality constraints, which move body parts along the z axis to prevent them from visibly intersecting each other. These constraints are applied only at the silhouettes of overlapping parts, and are dynamically updated each frame.
In steps (d) through (h) above, ARAP-L transforms a model from one with intersecting 3D parts to one with the depth ordering specified by the user. The layering constraints force the leg’s silhouette to stay in front of the body (green), and the body’s silhouette to stay behind the leg (yellow). Equality constraints (red) seal together the loose boundaries between the leg and the body.
Meanwhile, in a separate thread of the framework, we satisfy point constraints to make the model follow user-defined control points (described in the section below) in the xy-plane. This ARAP-L method allows us to combine modeling, rigging, deformation, and animation all into a single process that is much more approachable to the non-specialist user.
The model deforms to match the point constraints (red dots) while the layering constraints prevent the parts from visibly intersecting.
Animation To pose the model, the user can create control points anywhere on the model’s surface and move them. The deformation system converges over multiple frames, which gives the model’s movement a soft and floppy quality, allowing the user to intuitively grasp its dynamic properties — an essential prerequisite for kinesthetic learning.
Because the effect of deformations converges over multiple frames, our system lends 3D models a soft and dynamic quality.
To create animation, the system records the user’s movements in real time. The user can animate one control point, then play back that movement while recording additional control points. In this way, the user can build up a complex action like a walk by layering animation, one body part at a time. At every stage of the animation process, the only task required of the user is to move points around in 2D, a low-risk workflow meant to encourage experimentation and play.
Conclusion We believe this new way of creating animation is intuitive and can thus help democratize the field of computer animation, encouraging novices who would normally be unable to try it on their own as well as experts who often require fast iteration under tight deadlines. Here you can see a few of the animated characters that have been created using Monster Mash. Most of these were created in a matter of minutes.
A selection of animated characters created using Monster Mash. The original hand-drawn outline used to create each 3D model is visible as an inset above each character.
All of the code for Monster Mash is available as open source, and you can watch our presentation and read our paper from SIGGRAPH Asia 2020 to learn more. We hope this software will make creating 3D animations more broadly accessible. Try out the online demo and see for yourself!
Acknowledgements Monster Mash is the result of a collaboration between Google Research, Czech Technical University in Prague, ETH Zürich, and the University of Washington. Key contributors include Marek Dvorožňák, Daniel Sýkora, Cassidy Curtis, Brian Curless, Olga Sorkine-Hornung, and David Salesin. We are also grateful to Hélène Leroux, Neth Nom, David Murphy, Samuel Leather, Pavla Sýkorová, and Jakub Javora for participating in the early interactive sessions.
Posted by Jeff Dean, Senior Fellow and SVP of Google Research and Health, on behalf of the entire Google Research community
When I joined Google over 20 years ago, we were just figuring out how to really start on the journey of making a high quality and comprehensive search service for information on the web, using lots of curiously wired computers. Fast forward to today, and while we’re taking on a much broader array of technical challenges, it’s still with the same overarching goal of organizing the world's information and making it universally accessible and useful. In 2020, as the world has been reshaped by COVID-19, we saw the ways research-developed technologies could help billions of people better communicate, understand the world, and get things done. I’m proud of what we’ve accomplished, and excited about new possibilities on the horizon.
The goal of Google Research is to work on long-term, ambitious problems across a wide range of important topics — from predicting the spread of COVID-19, to designing algorithms, to learning to translate more and more languages automatically, to mitigating bias in ML models. In the spirit of our annual reviews for 2019, 2018, and more narrowly focused reviews of some work in 2017 and 2016, this post covers key Google Research highlights from this unusual year. This is a long post, but grouped into many different sections. Hopefully, there’s something interesting in here for everyone! For a more comprehensive look, please see our >750 research publications in 2020.
COVID-19 and Health As the impact of COVID-19 took a tremendous toll on people’s lives, researchers and developers around the world rallied together to develop tools and technologies to help public health officials and policymakers understand and respond to the pandemic. Apple and Google partnered in 2020 to develop the Exposure Notifications System (ENS), a Bluetooth-enabled privacy-preserving technology that allows people to be notified if they have been exposed to others who have tested positive for COVID-19. ENS supplements traditional contact tracing efforts and has been deployed by public health authorities in more than 50 countries, states and regions to help curb the spread of infection.
In the early days of the pandemic, public health officials signalled their need for more comprehensive data to combat the virus’ rapid spread. Our Community Mobility Reports, which provide anonymized insights into movement trends, are helping researchers not only understand the impact of policies like stay-at-home directives and social distancing, and also conduct economic forecasting.
Community Mobility Reports: Navigate and download a report for regions of interest.
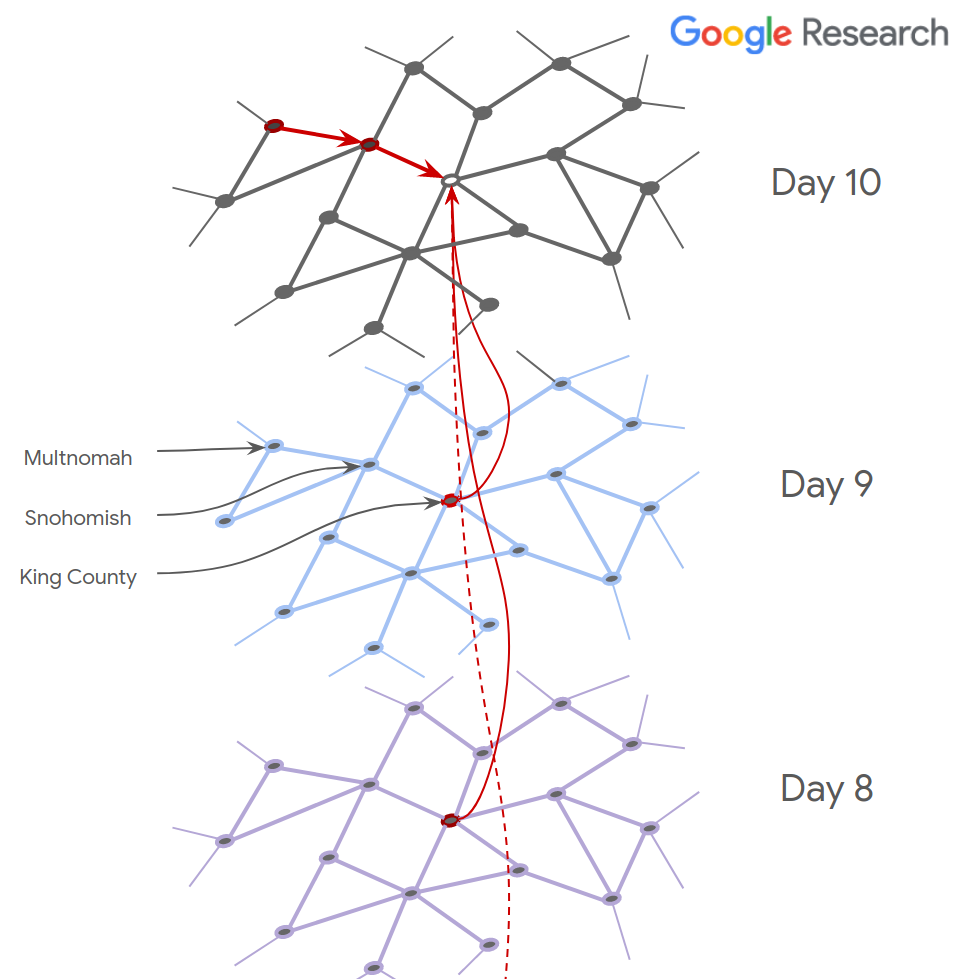
Our own researchers have also explored using this anonymized data to forecast COVID-19 spreadusing graph neural networks instead of traditional time series-based models.
Although the research community knew little about this disease and secondary effects initially, we’re learning more every day. Our COVID-19 Search Trends symptoms allows researchers to explore temporal or symptomatic associations, such as anosmia — the loss of smell that is sometimes a symptom of the virus. To further support the broader research community, we launched Google Health Studies app to provide the public ways to participate in research studies.
Our COVID-19 Search Trends are helping researchers study the link between the disease’s spread and symptom-related searches.
Teams across Google are contributing tools and resources to the broader scientific community, which is working to address the health and economic impacts of the virus.
Accurate information is critical in dealing with public health threats. We collaborated with many product teams at Google in order to improve information quality about COVID-19 in Google News and Search through supporting fact checking efforts, as well as similar efforts in YouTube.
Modelling a complex global event is particularly challenging and requires more comprehensive epidemiological datasets, the development of novel interpretable models and agent-based simulators to inform the public health response. Machine learning techniques have also helped in other ways from deploying natural language understanding to helping researchers quickly navigate the mountains of COVID-19 scientific literature, applying anonymization technology to protect privacy while making useful datasets available, and exploring whether public health can conduct faster screening with fewer tests via Bayesian group testing.
These are only a sample of the many pieces of work that happened across Google to help users and public health authorities respond to COVID-19. For more, see using technology to help take on COVID-19.
To determine the aggressiveness of prostate cancers, pathologists examine a biopsy and assign it a Gleason grade. In published research, our system was able to grade with higher accuracy than a cohort of pathologists who have not had specialist training in prostate cancer. The first stage of the deep learning system assigns a Gleason grade to every region in a biopsy. In this biopsy, green indicates Gleason pattern 3, while yellow indicates Gleason pattern 4.
We’ve also been working on systems to help identify skin disease, help detect age-related macular degeneration (the leading cause of blindness in the U.S. and U.K., and the third-largest cause of blindness worldwide), and on potential novel non-invasive diagnostics (e.g., being able to detect signs of anemia from retinal images).
Our study examines how a deep learning model can quantify hemoglobin levels — a measure doctors use to detect anemia — from retinal images.
This year has also brought exciting demonstrations of how these same technologies can peer into the human genome. Google’s open-source tool, DeepVariant, identifies genomic variants in sequencing data using a convolutional neural network, and this year won the FDA Challenge for best accuracy in 3 out of 4 categories. Using this same tool, a study led by the Dana-Farber Cancer Institute improved diagnostic yield by 14% for genetic variants that lead to prostate cancer and melanoma in a cohort of 2,367 cancer patients.
Research doesn’t end at measurement of experimental accuracy. Ultimately, truly helping patients receive better care requires understanding how ML tools will affect people in the real world. This year we began work with Mayo Clinic to develop a machine learning system to assist in radiotherapy planning and to better understand how this technology could be deployed into clinical practice. With our partners in Thailand, we’ve used diabetic eye disease screening as a test case in how we can build systems with people at the center, and recognize the fundamental role of diversity, equity, and inclusion in building tools for a healthier world.
Weather, Environment and Climate Change Machine learning can help us better understand the environment and make useful predictions to help people in both their everyday life as well as in disaster situations. For weather and precipitation forecasting, computationally intensive physics-based models like NOAA’s HRRR have long reigned supreme. We have been able to show, though, that ML-based forecasting systems can predict current precipitation with much better spatial resolution (“Is it raining in my local park in Seattle?” and not just “Is it raining in Seattle?”) and can produce short-term forecasts of up to eight hours that are considerably more accurate than HRRR, and can compute the forecast more quickly, yet with higher temporal and spatial resolution.
A visualization of predictions made over the course of roughly one day. Left: The 1-hour HRRR prediction made at the top of each hour, the limit to how often HRRR provides predictions. Center: The ground truth, i.e., what we are trying to predict. Right: The predictions made by our model. Our predictions are every 2 minutes (displayed here every 15 minutes) at roughly 10 times the spatial resolution made by HRRR. Notice that we capture the general motion and general shape of the storm.
We’ve also developed an improved technique called HydroNets, which uses a network of neural networks to model the actual river systems in the world to more accurately understand the interactions of upstream water levels to downstream inundation, resulting in more accurate water-level predictions and flood forecasting. Using these techniques, we've expanded our coverage of flood alerts by 20x in India and Bangladesh, helping to better protect more than 200 million people in 250,000 square kilometers.
Based on this work, we’re excited to partner with NOAA on using AI and ML to amplify NOAA’s environmental monitoring, weather forecasting and climate research using Google Cloud’s infrastructure.
Accessibility Machine learning continues to provide amazing opportunities for improving accessibility, because it can learn to transfer one kind of sensory input into others. As one example, we released Lookout, an Android application that can help visually impaired users by identifying packaged foods, both in a grocery store and also in their kitchen cupboard at home. The machine learning system behind Lookout demonstrates that a powerful-but-compact machine learning model can accomplish this in real-time on a phone for nearly 2 million products.
Similarly, people who communicate with sign language find it difficult to use video conferencing systems because even if they are signing, they are not detected as actively speaking by audio-based speaker detection systems. Developing Real-Time, Automatic Sign Language Detection for Video Conferencing presents a real-time sign language detection model and demonstrates how it can be used to provide video conferencing systems with a mechanism to identify the person signing as the active speaker.
We also enabled useful Android accessibility capabilities such as Voice Access and Sound Notifications for important household sounds.
Applications of ML to Other Fields Machine learning continues to prove vital in helping us make progress across many fields of science. In 2020, in collaboration with the FlyEM team at HHMI Janelia Research Campus, we released the drosophila hemibrain connectome, the large synapse-resolution map of brain connectivity, reconstructed using large-scale machine learning models applied to high-resolution electron microscope imaging of brain tissue. This connectome information will aid neuroscientists in a wide variety of inquiries, helping us all better understand how brains function. Be sure to check out the very fly interactive 3-D UI!
The application of ML to problems in systems biology is also on the rise. Our Google Accelerated Science team, in collaboration with our colleagues at Calico, have been applying machine learning to yeast, to get a better understanding of how genes work together as a whole system. We’ve also been exploring how to use model-based reinforcement learning in order to design biological sequences like DNA or proteins that have desirable properties for medical or industrial uses. Model-based RL is used to improve sample efficiency. At each round of experimentation the policy is trained offline using a simulator fit on functional measurements from prior rounds. On various tasks like designing DNA transcription factor binding sites, designing antimicrobial proteins, and optimizing the energy of Ising models based on protein structures, we find that model-based RL is an attractive alternative to existing methods.
In partnership with X-Chem Pharmaceuticals and ZebiAI, we have also been developing ML techniques to do “virtual screening” of promising molecular compounds computationally. Previous work in this area has tended to focus on relatively small sets of related compounds, but in this work, we are trying to use DNA-encoded small molecule libraries in order to be able to generalize to find “hits” across a wide swath of chemical space, reducing the need for slower, physical-based lab work in order to progress from idea to working pharmaceutical.
We’ve also seen success applying machine learning to core computer science and computer systems problems, a growing trend that is spawning entire new conferences like MLSys. In Learning-based Memory Allocation for C++ Server Workloads, a neural network-based language model predicts context-sensitive per-allocation site object lifetime information, and then uses this to organize the heap so as to reduce fragmentation. It is able to reduce fragmentation by up to 78% while only using huge pages (which are better for TLB behavior). End-to-End, Transferable Deep RL for Graph Optimization described an end-to-end transferable deep reinforcement learning method for computational graph optimization that shows 33%-60% speedup on three graph optimization tasks compared to TensorFlow default optimization, with 15x faster convergence over prior computation graph optimization methods.
Overview of GO: An end-to-end graph policy network that combines graph embedding and sequential attention.
As described in Chip Design with Deep Reinforcement Learning, we have also been applying reinforcement learning to the problem of place-and-route in computer chip design. This is normally a very time-consuming, labor-intensive process, and is a major reason that going from an idea for a chip to actually having a fully designed and fabricated chip takes so long. Unlike prior methods, our approach has the ability to learn from past experience and improve over time. In particular, as we train over a greater number of chip blocks, our method becomes better at rapidly generating optimized placements for previously unseen chip blocks. The system is able to generate placements that usually outperform those of human chip design experts, and we have been using this system (running on TPUs) to do placement and layout for major portions of future generations of TPUs. Menger is a recent infrastructure we’ve built for large-scale distributed reinforcement learning that is yielding promising performance for difficult RL tasks such as chip design.
Macro placements of Ariane, an open-source RISC-V processor, as training progresses. On the left, the policy is being trained from scratch, and on the right, a pre-trained policy is being fine-tuned for this chip. Each rectangle represents an individual macro placement. Notice how the cavity that is occupied by non-macro logic cells that is discovered by the from-scratch policy is already present from the outset in the pre-trained policy’s placement.
Aligning predictions to pre-identified concepts can make models more interpretable, as described in Concept Bottleneck Models.
In collaboration with many other institutions, we also looked into memorization effects of language models, showing that training data extraction attacks are realistic threats on state-of-the-art large language models. This finding along with a result that embedding models can leak information can have significant privacy implications (especially for models trained on private data). In Thieves of Sesame Street: Model Extraction on BERT-based APIs, we demonstrated that attackers with only API access to a language model could create models whose outputs had very high correlation with the original model, even with relatively few API queries to the original model. Subsequent work demonstrated that attackers can extract smaller models with arbitrary accuracy. On the AI Principle of safety we demonstrated that thirteen published defenses to adversarial examples can be circumvented despite attempting to perform evaluations using adaptive attacks. Our work focuses on laying out the methodology and the approach necessary to perform an adaptive attack, and thus will allow the community to make further progress in building more robust models.
The Model Cards work that was introduced in collaboration with the University of Toronto in 2019 has been growing in influence. Indeed, many well-known models like OpenAI’s GPT-2 and GPT-3, many of Google’s MediaPipe models and various Google Cloud APIs have all adopted Model Cards as a way of giving users of a machine learning model more information about the model’s development and the observed behavior of the model under different conditions. To make this easier for others to adopt for their own machine learning models, we also introduced the Model Card Toolkit for easier model transparency reporting. In order to increase transparency in ML development practices, we demonstrate the applicability of a range of best practices throughout the dataset development lifecycle, including data requirements specification and data acceptance testing.
Differential privacy is a way to formally quantify privacy protections and requires a rethinking of the most basic algorithms to operate in a way that they do not leak information about any particular individual. In particular, differential privacy can help in addressing memorization effects and information leakage of the kinds mentioned above. In 2020 there were a number of exciting developments, from more efficient ways of computing private empirical risk minimizers to private clustering methods with tight approximation guarantees and private sketching algorithms. We also open sourced the differential privacy libraries that lie at the core of our internal tools, taking extra care to protect against leakage caused by the floating point representation of real numbers. These are the exact same tools that we use to produce differentially private COVID-19 mobility reports that have been a valuable source of anonymous data for researchers and policymakers.
To help developers assess the privacy properties of their classification models we released an ML privacy testing library in Tensorflow. We hope this library will be the starting point of a robust privacy testing suite that can be used by any machine learning developer around the world.
Membership inference attack on models for CIFAR10. The x-axis is the test accuracy of the model, and y-axis is vulnerability score (lower means more private). Vulnerability grows while test accuracy remains the same — better generalization could prevent privacy leakage.
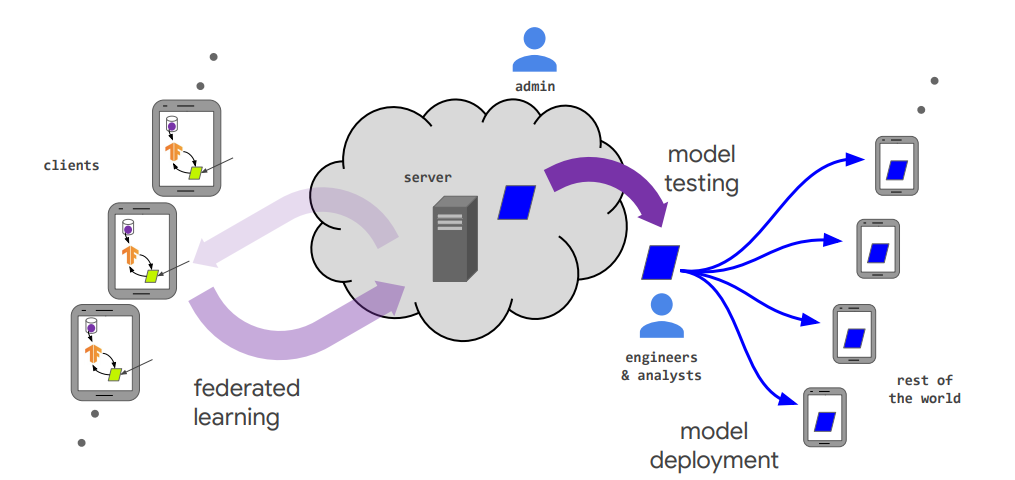
In addition to pushing the state of the art in developing private algorithms, I am excited about the advances we made in weaving privacy into the fabric of our products. One of the best examples is Chrome’s Privacy Sandbox, which changes the underpinnings of the advertising ecosystem and helps systematically protect individuals’ privacy. As part of the project, we proposed and evaluated a number of different APIs, including federated learning of cohorts (FLoC) for interest based targeting, and aggregate APIs for differentially private measurement.
Security for our users is also an area of considerable interest for us. In 2020, we continued to improve protections for Gmail users, by deploying a new ML-based document scanner that provides protection against malicious documents, which increased malicious office document detection by 10% on a daily basis. Thanks to its ability to generalize, this tool has been very effective at blocking some adversarial malware campaigns that elude other detection mechanisms and increased our detection rate by 150% in some cases.
On the account protection side, we released a fully open-source security key firmware to help advance state of art in the two factor authentication space, staying focused on security keys as the best way to protect accounts against phishing.
Natural Language Understanding Better understanding of language is an area where we saw considerable progress this year. Much of the work in this space from Google and elsewhere now relies on Transformers, a particular style of neural network model originally developed for language problems (but with a growing body of evidence that they are also useful for images, videos, speech, protein folding, and a wide variety of other domains).
One area of excitement is in dialog systems that can chat with a user about something of interest, often encompassing multiple turns of interaction. While successful work in this area to date has involved creating systems that are specialized around particular topics (e.g., Duplex) these systems cannot carry on general conversations. In pursuit of the general research goal of creating systems capable of much more open-ended dialog, in 2020 we described Meena, a learned conversational agent that aspirationally can chat about anything. Meena achieves high scores on a dialog system metric called SSA, which measures both sensibility and specificity of responses. We’ve seen that as we scale up the model size of Meena, it is able to achieve lower perplexity and, as shown in the paper, lower perplexity correlates extremely closely with improved SSA.
A chat between Meena (left) and a person (right).
One well-known issue with generative language models and dialog systems is that when discussing factual data, the model’s capacity may not be large enough to remember every specific detail about a topic, so they generate language that is plausible but incorrect. (This is not unique to machines — people can commit these errors too.) To address this in dialog systems, we are exploring ways to augment a conversational agent by giving it access to external information sources (e.g., a large corpus of documents or a search engine API), and developing learning techniques to use this as an additional resource in order to generate language that is consistent with the retrieved text. Work in this area includes integrating retrieval into language representation models (and a key underlying technology for this to work well is something like ScaNN, an efficient vector similarity search, to efficiently match the desired information to information in the corpus of text). Once appropriate content is found, it can be better understood with approaches like using neural networks to find answers in tables and extracting structured data from templatic documents. Our work on PEGASUS, a state-of-the-art model for abstractive text summarization can also help to create automatic summaries from any piece of text, a general technique useful in conversations, retrieval systems, and many other places.
Efficiency of NLP models has also been a significant focus for our work in 2020. Techniques like transfer learning and multi-task learning can dramatically help with making general NLP models usable for new tasks with modest amounts of computation. Work in this vein includes transfer learning explorations in T5, sparse activation of models (as in our GShard work mentioned below), and more efficient model pre-training with ELECTRA. Several threads of work also look to improve on the basic Transformer architecture, including Reformer, which uses locality-sensitive hashing and reversible computation to more efficiently support much larger attention windows, Performers, which use an approach for attention that scales linearly rather than quadratically (and discusses its use in the context of protein modeling), and ETC and BigBird, which utilize global and sparse random connections, to enable linear scaling for larger and structured sequences. We also explored techniques for creating very lightweight NLP models that are 100x smaller than a larger BERT model, but perform nearly as well for some tasks, making them very suitable for on-device NLP. In Encode, Tag and Realize, we also explored new approaches for generative text models that use edit operations rather than fully general text generation, which can have advantages in computation requirements for generation, more control over the generated text, and require less training data.
Language Translation Effective language translation helps bring the world closer together by enabling us to all communicate, despite speaking different languages. To date, over a billion people around the world use Google Translate, and last year we added support for five new languages (Kinyarwanda, Odia, Tatar, Turkmen and Uyghur, collectively spoken by 75 million people). Translation quality continues to improve, showing an average +5 BLEU point gain across more than 100 languages from May 2019 to May 2020, through a wide variety of techniques like improved model architectures and training, better handling of noise in datasets, multilingual transfer and multi-task learning, and better use of monolingual data to improve low-resource languages (those without much written public content on the web), directly in line with our goals of improving ML fairness of machine learning systems to provide benefits to the greatest number of people possible.
We strongly believe that continued scaling of multilingual translation models will bring further quality improvements, especially to the billions of speakers of low-resource languages around the world. In GShard: Scaling Giant Models with Conditional Computation and Automatic Sharding, Google researchers showed that training sparsely-activated multilingual translation models of up to 600 billion parameters leads to major improvements in translation quality for 100 languages as measured by BLEU score improvement over a baseline of a separate 400M parameter monolingual baseline model for each language. Three trends stood out in this work, illustrated by Figure 6 in the paper, reproduced below (see the paper for complete discussion):
The BLEU score improvements from multilingual training are high for all languages but are even higher for low-resource languages (right hand side of graph is higher than the left) whose speakers represent billions of people in some of the world’s most marginalized communities. Each rectangle on the figure represents languages with 1B speakers.
The larger and deeper the model, the larger the BLEU score improvements were across all languages (the lines hardly ever cross).
Large, sparse models also show a ~10x to 100x improvement in computational efficiency for model training over training a large, dense model, while simultaneously matching or significantly exceeding the BLEU scores of the large, dense model (computational efficiency discussed in paper).
We’re actively working on bringing the benefits demonstrated in this GShard research work to Google Translate, as well as training single models that cover 1000 languages, including languages like Dhivehi and Sudanese Arabic (while sharing some challenges that needed solving along the way).
Machine Learning Algorithms We continue to develop new machine learning algorithms and approaches for training that enable systems to learn more quickly and from less supervised data. By replaying intermediate results during training of neural networks, we find that we can fill idle time on ML accelerators and therefore can train neural networks faster. By changing the connectivity of neurons dynamically during training, we can find better solutions compared with statically-connected neural networks. We also developed SimCLR, a new self-supervised and semi-supervised learning technique that simultaneously maximizes agreement between differently transformed views of the same image and minimizes agreement between transformed views of different images. This approach significantly improves on the best self-supervised learning techniques.
ImageNet top-1 accuracy of linear classifiers trained on representations learned with different self-supervised methods (pretrained on ImageNet). Gray cross indicates supervised ResNet-50.
We also extended the idea of contrastive learning to the supervised regime, resulting in a loss function that significantly improves over cross-entropy for supervised classification problems.
Reinforcement Learning Reinforcement learning (RL), which learns to make good long-term decisions from limited experience, has been an important focus area for us. An important challenge in RL is to learn to make decisions from few data points, and we’ve improved RL algorithm efficiency through learning from fixed datasets, learning from other agents, and improving exploration.
We’ve also made significant advances in the mathematical theory of reinforcement learning. One of our main areas of research was studying reinforcement learning as an optimization process. We found connections to the Frank-Wolfe algorithm, momentum methods, KL divergence regularization, operator theory, and convergence analysis; some of these insights led to an algorithm that achieves state-of-the-art performance in challenging RL benchmarks and discovery that polynomial transfer functions avoid convergence problems associated with softmax, both in RL and supervised learning. We’ve made some exciting progress on the topic of safe reinforcement learning, where one seeks to discover optimal control rules while respecting important experimental constraints. This includes a framework for safe policy optimization. We studied efficient RL-based algorithms for solving a class of problems known as mean field games, which model systems with a large number of decision-makers, from mobile networks to electric grids.
We’ve made breakthroughs toward generalization to new tasks and environments, an important challenge for scaling up RL to complex real-world problems. A 2020 focus area was population-based learning-to-learn methods, where another RL or evolutionary agent trained a population of RL agents to create a curriculum of emergent complexity, and discover new state-of-the-art RL algorithms. Learning to estimate the importance of data points in the training set and parts of visual input with selective attention resulted in significantly more skillful RL agents.
Overview of our method and illustration of data processing flow in AttentionAgent. Top: Input transformation — A sliding window segments an input image into smaller patches, and then “flattens” them for future processing. Middle: Patch election — The modified self-attention module holds votes between patches to generate a patch importance vector. Bottom: Action generation — AttentionAgent picks the patches of the highest importance, extracts corresponding features and makes decisions based on them.
We shared open source tools for scaling up and productionizing RL. To expand the scope and problems tackled by users, we’ve introduced SEED, a massively parallel RL agent, released a library for measuring the RL algorithm reliability, and a new version of TF-Agents that includes distributed RL, TPU support, and a full set of bandit algorithms. In addition, we performed a large empirical study of RL algorithms to improve hyperparameter selection and algorithm design.
AutoML Using learning algorithms to develop new machine learning techniques and solutions, or meta-learning, is a very active and exciting area of research. In much of our previous work in this area, we’ve created search spaces that look at how to find ways to combine sophisticated hand-designed components together in interesting ways. In AutoML-Zero: Evolving Code that Learns, we took a different approach, by giving an evolutionary algorithm a search space consisting of very primitive operations (like addition, subtraction, variable assignment, and matrix multiplication) in order to see if it was possible to evolve modern ML algorithms from scratch. The presence of useful learning algorithms in this space is incredibly sparse, so it is remarkable that the system was able to progressively evolve more and more sophisticated ML algorithms. As shown in the figure below, the system reinvents many of the most important ML discoveries over the past 30 years, such as linear models, gradient descent, rectified linear units, effective learning rate settings and weight initializations, and gradient normalization.
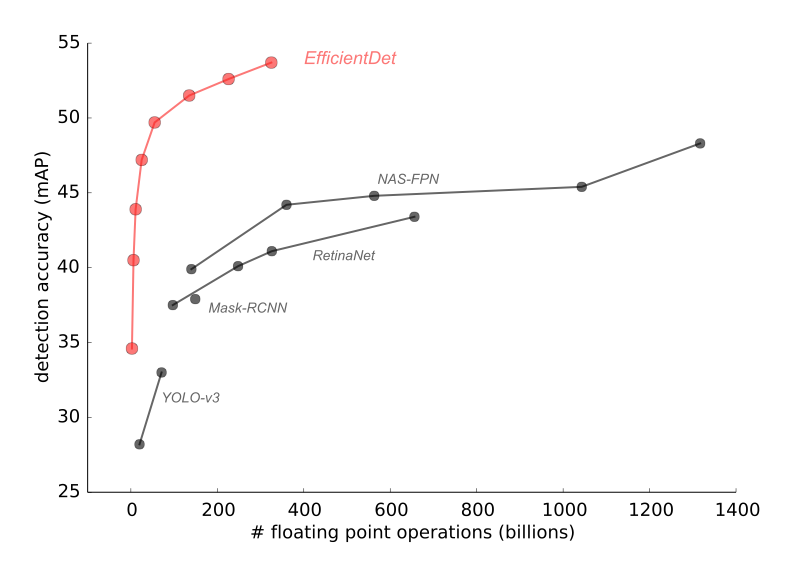
We also used meta-learning to discover a variety of new efficient architectures for object detection in both still images and videos. Last year’s work on EfficientNet for efficient image classification architectures showed significant accuracy improvements and computational cost reductions for image classification. In follow-on work this year, EfficientDet: Towards Scalable and Efficient Object Detection builds on top of the EfficientNet work to derive new efficient architectures for object detection and localization, showing remarkable improvements in both highest absolute accuracy, as well as computational cost reductions of 13-42x over previous approaches to achieve a given level of accuracy.
EfficientDet achieves state-of-the-art 52.2 mAP, up 1.5 points from the prior state of the art (not shown since it is at 3045B FLOPs) on COCO test-dev under the same setting. Under the same accuracy constraint, EfficientDet models are 4x-9x smaller and use 13x-42x less computation than previous detectors.
This approach can also be used to develop effective model architectures for time series forecasting. Using AutoML for Time Series Forecasting describes the system that discovers new forecasting models via an automated search over a search space involving many interesting kinds of low-level building blocks, and its effectiveness was demonstrated in the Kaggle M5 Forecasting Competition, by generating an algorithm and system that placed 138th out of 5558 participants (top 2.5%). While many of the competitive forecasting models required months of manual effort to create, our AutoML solution found the model in a short time with only a moderate compute cost (500 CPUs for 2 hours) and no human intervention.
Better Understanding of ML Algorithms and Models Deeper understanding of machine learning algorithms and models is crucial for designing and training more effective models, as well as understanding when models may fail. Last year, we focused on fundamental questions around representation power, optimization, model generalization, and label noise, among others. As mentioned earlier in this post, Transformer networks have had a huge impact on modeling language, speech and vision problems, but what is the class of functions represented by these models? Recently we showed that transformers are universal approximators for sequence-to-sequence functions. Furthermore, sparse transformers also remain universal approximators even when they use just a linear number of interactions among the tokens. We have been developing new optimization techniques based on layerwise adaptive learning rates to improve the convergence speed of transformers, e.g., Large batch optimization for deep learning (LAMB): Training BERT in 76 minutes.
As neural networks are made wider and deeper, they often train faster and generalize better. This is a core mystery in deep learning since classical learning theory suggests that large networks should overfit more. We are working to understand neural networks in this overparameterized regime. In the limit of infinite width, neural networks take on a surprisingly simple form, and are described by a Neural Network Gaussian Process (NNGP) or Neural Tangent Kernel (NTK). We studied this phenomenon theoretically and experimentally, and released Neural Tangents, an open-source software library written in JAX that allows researchers to build and train infinite-width neural networks.
Left: A schematic showing how deep neural networks induce simple input / output maps as they become infinitely wide. Right: As the width of a neural network increases, we see that the distribution of outputs over different random instantiations of the network becomes Gaussian.
Lastly, in real-world problems, one often needs to deal with significant label noise. For instance, in large scale learning scenarios, weakly labeled data is available in abundance with large label noise. We have developed new techniques for distilling effective supervision from severe label noise leading to state-of-the-art results. We have further analyzed the effects of training neural networks with random labels, and shown that it leads to alignment between network parameters and input data, enabling faster downstream training than initializing from scratch. We have also explored questions such as whether label smoothing or gradient clipping can mitigate label noise, leading to new insights for developing robust training techniques with noisy labels.
Algorithmic Foundations and Theory 2020 was a productive year for our work in algorithmic foundations and theory, with several impactful research publications and notable results. On the optimization front, our paper on edge-weighted online bipartite matching develops a new technique for online competitive algorithms and solves a thirty-year old open problem for the edge-weighted variant with applications in efficient online ad allocation. Along with this work in online allocation, we developed dual mirror descent techniques that generalize to a variety of models with additional diversity and fairness constraints, and published a sequence of papers on the topic of online optimization with ML advice in online scheduling, online learning and online linear optimization. Another research result gave the first improvement in 50 years on the classic bipartite matching in dense graphs. Finally, another paper solves a long-standing open problem about chasing convex bodies online — using an algorithm from The Book, no less.
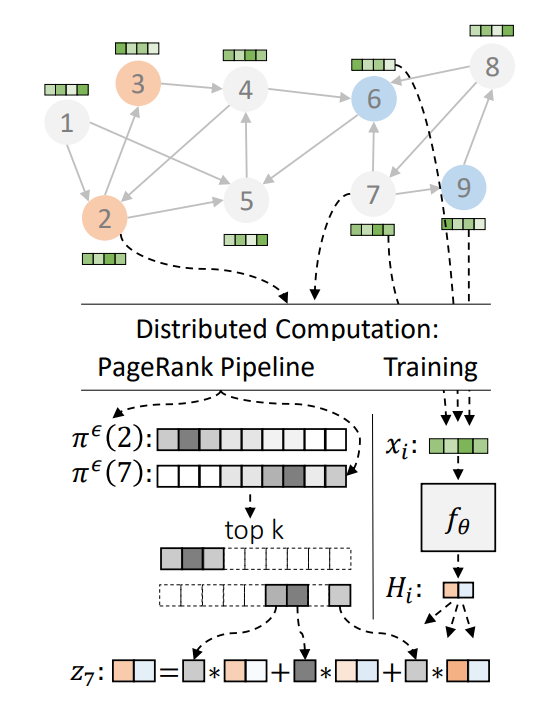
We also continued our work in scalable graph mining and graph-based learning and hosted the Graph Mining & Learning at Scale Workshop at NeurIPS’20, which covered work on scalable graph algorithms including graph clustering, graph embedding, causal inference, and graph neural networks. As part of the workshop, we showed how to solve several fundamental graph problems faster, both in theory and practice, by augmenting standard synchronous computation frameworks like MapReduce with a distributed hash-table similar to a BigTable. Our extensive empirical study validates the practical relevance of the AMPC model inspired by our use of distributed hash tables in massive parallel algorithms for hierarchical clustering and connected components, and our theoretical results show how to solve many of these problems in constant distributed rounds, greatly improving upon our previous results. We also achieved exponential speedup for computing PageRank and random walks. On the graph-based learning side, we presented Grale, our framework for designing graphs for use in machine learning. Furthermore, we presented our work on more scalable graph neural network models, where we show that PageRank can be used to greatly accelerate inference in GNNs.
Machine Perception Perceiving the world around us — understanding, modeling and acting on visual, auditory and multimodal input — continues to be a research area with tremendous potential to be beneficial in our everyday lives.
In 2020, deep learning powered new approaches that bring 3D computer vision and computer graphics closer together. CvxNet, deep implicit functions for 3D shapes, neural voxel rendering and CoReNet are a few examples of this direction. Furthermore, our research on representing scenes as neural radiance fields (aka NeRF, see also this blog post) is a good example of how Google Research's academic collaborations stimulate rapid progress in the area of neural volume rendering.
In Learning to Factorize and Relight a City, a collaboration with UC Berkeley, we proposed a learning-based framework for disentangling outdoor scenes into temporally-varying illumination and permanent scene factors. This gives the ability to change lighting effects and scene geometry for any Street View panorama, or even turn it into a full-day timelapse video.
Our work on generative human shape and articulated pose models introduces a statistical, articulated 3D human shape modeling pipeline, within a fully trainable, modular, deep learning framework. Such models enable 3D human pose and shape reconstruction of people from a single photo to better understand the scene.
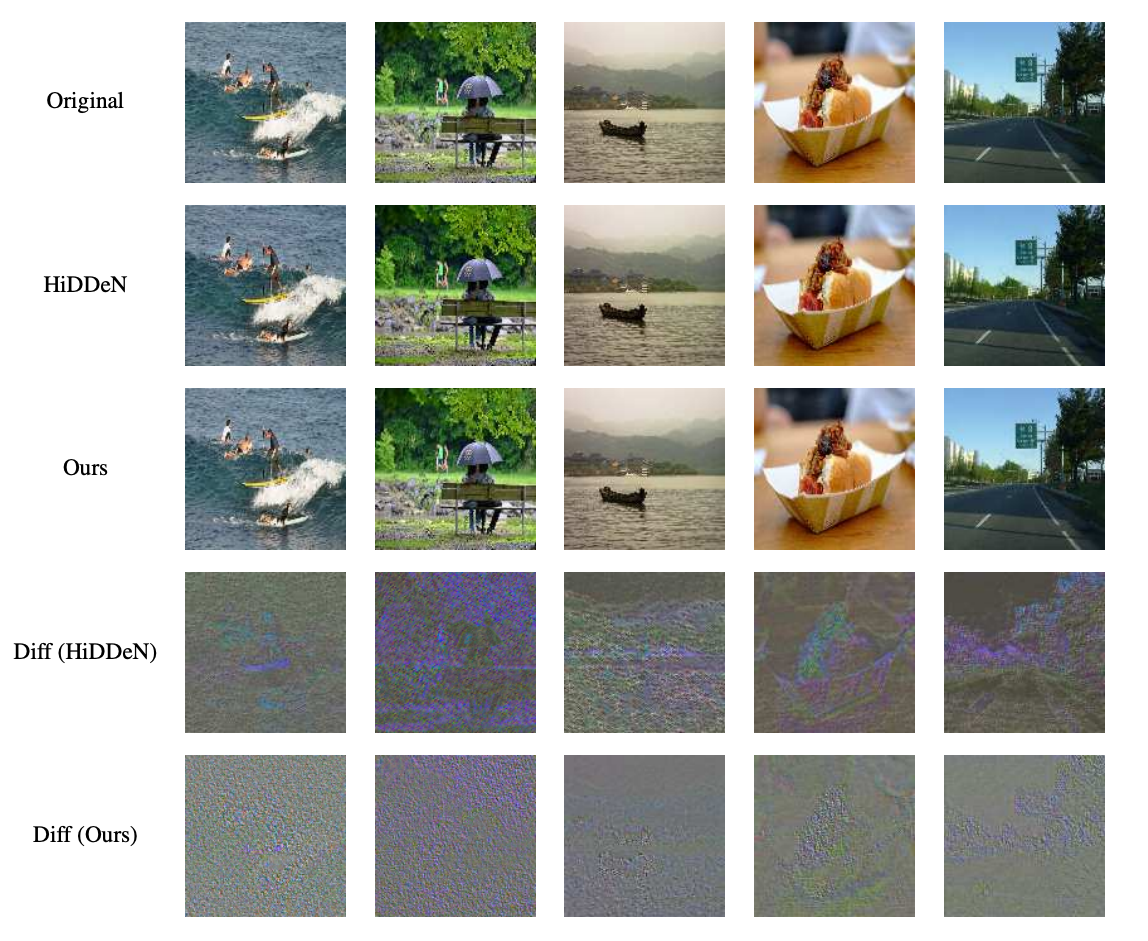
Samples of encoded and cover images for Distortion Agnostic Deep Watermarking. First row: Cover image with no embedded message. Second row: Encoded image from HiDDeN combined distortion model. Third row: Encoded images from our model. Fourth row: Normalized difference of the encoded image and cover image for the HiDDeN combined model. Fifth row: Normalized difference for our model
Additional important themes in perceptual research included:
We continued to make strides to improve experiences and promote helpfulness on mobile devices through ML-based solutions. Our ability to run sophisticated natural language processing on-device, enabling more natural conversational features, continues to improve. In 2020, we expanded Call Screen and launched Hold for Me to allow users to save time when performing mundane tasks, and we also launched language-based actions and language navigability of our Recorder app to aid productivity.
We have used Google's Duplex technology to make calls to businesses and confirm things like temporary closures. This has enabled us to make 3 million updates to business information globally, that have been seen over 20 billion times on Maps and Search. We also used text to speech technology for easier access to web pages, by enabling Google Assistant to read it aloud, supporting 42 languages.
We also continued to make meaningful improvements to imaging applications. We made it easier to capture precious moments on Pixel with innovative controls and new ways to relight, edit, enhance and relive them again in Google Photos. For the Pixel camera, beginning with Pixel 4 and 4a, we added Live HDR+, which uses machine learning to approximate the vibrance and balanced exposure and appearance of HDR+ burst photography in real time in the viewfinder. We also created dual exposure controls, which allow the brightness of shadows and highlights in a scene to be adjusted independently — live in the viewfinder.
More recently, we introduced Portrait Light, a new post-capture feature for the Pixel Camera and Google Photos apps that adds a simulated directional light source to portraits. This feature is again one that is powered by machine learning, having been trained on 70 different people, photographed one light at a time, in our pretty cool 331-LED Light Stage computational illumination system.
In the past year, Google researchers were excited to contribute to many new (and timely) ways of using Google products. Here are a few examples
Robotics In the area of robotics research, we’ve made tremendous progress in our ability to learn more and more complex, safe and robust robot behaviors with less and less data, using many of the RL techniques described earlier in the post.
Transporter Networks are a novel approach to learning how to represent robotic tasks as spatial displacements. Representing relations between objects and the robot end-effectors, as opposed to absolute positions in the environment, makes learning robust transformations of the workspace very efficient.
In Grounding Language in Play, we demonstrated how a robot can be taught to follow natural language instructions (in many languages!). This required a scalable approach to collecting paired data of natural language instructions and robot behaviors. One key insight is that this can be accomplished by asking robot operators to simply play with the robot, and label after-the-fact what instructions would have led to the robot accomplishing the same task.
One increased emphasis this year has been on safety: how do we deploy safe delivery drones in the real world? How do we explore the world in a way that always allows the robot to recover from its mistakes? How do we certify the stability of learned behaviors? This is a critical area of research on which we expect to see increased focus in the future.
Quantum Computing Our Quantum AI team continued its work to establish practical uses of quantum computing. We ran experimental algorithms on our Sycamore processors to simulate systems relevant to chemistry and physics. These simulations are approaching a scale at which they can not be performed on classical computers anymore, making good on Feynman’s original idea of using quantum computers as an efficient means to simulate systems in which quantum effects are important. We published new quantum algorithms, for instance to perform precise processor calibration, to show an advantage for quantum machine learning or to test quantum enhanced optimization. We also worked on programming models to make it easier to express quantum algorithms. We released qsim, an efficient simulation tool to develop and test quantum algorithms with up to 40 qubits on Google Cloud.
We continued to follow our roadmap towards building a universal error-corrected quantum computer. Our next milestone is the demonstration that quantum error correction can work in practice. To achieve this, we will show that a larger grid of qubits can hold logical information exponentially longer than a smaller grid, even though individual components such as qubits, couplers or I/O devices have imperfections. We are also particularly excited that we now have our own cleanroom which should significantly increase the speed and quality of our processor fabrication.
Many recent research breakthroughs have been enabled by increased computing power, and we make more than 500 petaflops of Cloud TPU computing power available for free to researchers around the world via the TFRC program to help broaden access to the machine learning research frontier. More than 120 TFRC-supported papers have been published to date, many of which would not have been possible without the computing resources that the program provides. For example, TFRC researchers have recently developed simulations of wildfire spread, helped analyze COVID-19 content and vaccine sentiment changes on social media networks, and advanced our collective understanding of the lottery ticket hypothesis and neural network pruning. Members of the TFRC community have also published experiments with Persian poetry, won a Kaggle contest on fine-grained fashion image segmentation, and shared tutorials and open-source tools as starting points for others. In 2021, we will change the name of the TFRC program to the TPU Research Cloud program to be more inclusive now that Cloud TPUs support JAX and PyTorch in addition to TensorFlow.
Finally, this was a huge year for Colab. Usage doubled, and we launched productivity features to help people do their work more efficiently, including improved Drive integration and access to the Colab VM via the terminal. And we launched Colab Pro to enable users to access faster GPUs, longer runtimes and more memory.
Open Datasets and Dataset Search Open datasets with clear and measurable goals are often very helpful in driving forward the field of machine learning. To help the research community find interesting datasets, we continue to index a wide variety of open datasets sourced from many different organizations with Google Dataset Search. We also think it's important to create new datasets for the community to explore and to develop new techniques, while ensuring that we share open data responsibly. This year, in addition to open datasets to help address the COVID crisis, we released a number of open datasets across many different areas:
Google Compute Cluster Trace Data: in 2011, Google published a trace of 29 days of compute activity on one of our compute clusters, which has proven very useful for the computer systems community to explore job scheduling policies, better understand utilization in these clusters, etc. This year we published a larger and more extensive version of this data, covering eight of our compute clusters with much finer-grained information.
Announcing the Objectron Dataset: a collection of 15,000 short, object-centric video clips annotated with 3-D bounding boxes, capturing a larger set of common objects from different angles, as well as 4M annotated images collected from a geo-diverse sample (covering 10 countries across five continents).
Open Images V6 — Now Featuring Localized Narratives: in addition to the 9M images annotated with 36M image-level labels, 15.8M bounding boxes, 2.8M instance segmentations, and 391k visual relationships found in version 5, this new release adds localized narratives, a completely new form of multimodal annotations that consist of synchronized voice, text, and mouse traces over the objects being described. In Open Images V6, these localized narratives are available for 500k of its images. Additionally, in order to facilitate comparison to previous works, we also release localized narratives annotations for the full 123k images of the COCO dataset.
TyDi QA: A Multilingual Question Answering Benchmark discusses a new benchmark for measuring effectiveness of multilingual question answering (since many benchmarks in this area are English-only or otherwise monolingual, and we feel answering questions in any language is important).
Wiki-40B: Multilingual Language Model Dataset is a new multilingual language model benchmark that is composed of 40+ languages spanning several scripts and linguistic families. With around 40 billion characters, we hope this new resource will accelerate the research of multilingual modeling. We also released high quality trained language models trained on this dataset, enabling easy comparison of different techniques with these baselines.
Meta-Dataset: A Dataset of Datasets for Few-Shot Learning is a dataset of datasets. One of the long-term goals in ML is to build systems that can generalize not from one example to another within the same task, but can generalize even across tasks to solve new problems with little or no training. This meta-dataset can allow us to measure progress towards this ultimate goal.
Google Landmarks Dataset v2 - A Large-Scale Benchmark for Instance-Level Recognition and Retrieval introduces the Google Landmarks Dataset v2 (GLDv2), a new benchmark for large-scale, fine-grained instance recognition and image retrieval in the domain of human-made and natural landmarks. GLDv2 is the largest such dataset to date by a large margin, including over 5M images and 200k distinct instance labels. Its test set consists of 118k images with ground truth annotations for both the retrieval and recognition tasks.
Research Community Interaction We are proud to enthusiastically support and participate in the broader research community. In 2020, Google researchers presented over 500 papers at leading research conferences, additionally serving on program committees, organizing workshops, tutorials and numerous other activities aimed at collectively progressing the state of the art in the field. To learn more about our contributions to some of the larger research conferences this year, please see our blog posts for ICLR 2020, CVPR 2020, ACL 2020, ICML 2020, ECCV 2020 and NeurIPS 2020.
In 2020 we supported external research with $37M in funding, including $8.5M in COVID research, $8M in research inclusion and equity, and $2M in responsible AI research. In February, we announced the 2019 Google Faculty Research Award Recipients, funding research proposals from 150 faculty members throughout the world. Among this group, 27% self-identified as members of historically underrepresented groups within technology. We also announced a new Research Scholar Program to support early-career professors who are pursuing research in fields relevant to Google via unrestricted gifts. As we have for more than a decade, we selected a group of incredibly talented PhD student researchers to receive Google PhD Fellowships, which provides funding for graduate studies, as well as mentorship as they pursue their research, and opportunities to interact with other Google PhD Fellows.
We are also expanding the ways that we support inclusion and bring new voices into the field of computer science. In 2020, we created a new Award for Inclusion Research program that supports academic research in computing and technology addressing the needs of underrepresented populations. In the inaugural set of awards, we selected 16 proposals for funding with 25 principal investigators, focused on topics around diversity and inclusion, algorithmic bias, education innovation, health tools, accessibility, gender bias, AI for social good, security, and social justice. We additionally partnered with the Computing Alliance of Hispanic-Serving Institutions (CAHSI) and the CMD-IT Diversifying Future Leadership in the Professoriate Alliance (FLIP) to create an award program for doctoral students from traditionally underrepresented backgrounds to support the last year of the completion of the dissertation requirements.
In 2019, Google’s CS Research Mentorship Program (CSRMP) helped provide mentoring to 37 undergraduate students to introduce them to conducting computer science research. Based on the success of the program in 2019/2020, we’re excited to greatly expand this program in 2020/2021 and will have hundreds of Google researchers mentoring hundreds of undergraduate students in order to encourage more people from underrepresented backgrounds to pursue computer science research careers. Finally, in October we provided exploreCSR awards to 50 institutions around the world for the 2020 academic year. These awards fund faculty to host workshops for undergraduates from underrepresented groups in order to encourage them to pursue CS research.
Looking Forward to 2021 and Beyond I’m excited about what’s to come, from our technical work on next-generation AI models, to the very human work of growing our community of researchers.
We’ll keep ensuring our research is done responsibly and has a positive impact, using our AI Principles as a guiding framework and applying particular scrutiny to topics that can have broad societal impact. This post covers just a few of the many papers on responsible AI that Google published in the past year. While pursuing our research, we’ll focus on:
Promoting research integrity: We’ll make sure Google keeps conducting a wide range of research in an appropriate manner, and provides comprehensive, scientific views on a variety of challenging, interesting topics.
Responsible AI development: Tackling tough topics will remain core to our work, and Google will continue creating new ML algorithms to make machine learning more efficient and accessible, developing approaches to combat unfair bias in language models, devising new techniques for ensuring privacy in learning systems, and much more. And importantly, beyond looking at AI development with a suitably critical eye, we’re eager to see what techniques we and others in the community can develop to mitigate risks and make sure new technologies have equitable, positive impacts on society.
Advancing diversity, equity, and inclusion: We care deeply that the people who are building influential products and computing systems better reflect the people using these products all around the world. Our efforts here are both within Google Research, as well as within the wider research and academic communities — we’ll be calling upon the academic and industry partners we work with to advance these efforts together. On a personal level, I am deeply committed to improving representation in computer science, having spent hundreds of hours working towards these goals over the last few years, as well as supporting universities like Berkeley, CMU, Cornell, Georgia Tech, Howard, UW, and numerous other organizations that work to advance inclusiveness. This is important to me, to Google, and to the broader computer science community.
Finally, looking ahead to the year, I’m particularly enthusiastic about the possibilities of building more general-purpose machine learning models that can handle a variety of modalities and that can automatically learn to accomplish new tasks with very few training examples. Advances in this area will empower people with dramatically more capable products, bringing better translation, speech recognition, language understanding and creative tools to billions of people all around the world.This kind of exploration and impact is what keeps us excited about our work!
Acknowledgements Thanks to Martin Abadi, Marc Bellemare, Elie Bursztein, Zhifeng Chen, Ed Chi, Charina Chou, Katherine Chou, Eli Collins, Greg Corrado, Corinna Cortes, Tiffany Deng, Tulsee Doshi, Robin Dua, Kemal El Moujahid, Aleksandra Faust, Orhan Firat, Jen Gennai, Till Hennig, Ben Hutchinson, Alex Ingerman, Tomáš Ižo, Matthew Johnson, Been Kim, Sanjiv Kumar, Yul Kwon, Steve Langdon, James Laudon, Quoc Le, Yossi Matias, Brendan McMahan, Aranyak Mehta, Vahab Mirrokni, Meg Mitchell, Hartmut Neven, Mohammad Norouzi, Timothy Novikoff, Michael Piatek, Florence Poirel, David Salesin, Nithya Sambasivan, Navin Sarma, Tom Small, Jascha Sohl-Dickstein, Zak Stone, Rahul Sukthankar, Mukund Sundararajan, Andreas Terzis, Sergei Vassilvitskii, Vincent Vanhoucke, and Leslie Yeh and others for helpful feedback and for drafting portions of this post, and to the entire Research and Health communities at Google for everyone’s contributions towards this work.
This week, the 16th European Conference on Computer Vision (ECCV2020) begins, a premier forum for the dissemination of research in computer vision and related fields. Being held virtually for the first time this year, Google is proud to be an ECCV2020 Platinum Partner and is excited to share our research with the community with nearly 50 accepted publications, alongside several tutorials and workshops.
If you are registered for ECCV this year, please visit our virtual booth in the Platinum Exhibition Hall to learn more about the research we’re presenting at ECCV 2020, including some demos and opportunities to connect with our researchers. You can also learn more about our contributions below (Google affiliations in bold).
Organizing Committee General Chairs: Vittorio Ferrari, Bob Fisher, Cordelia Schmid, Emanuele TrucoAcademic Demonstrations Chair: Thomas Mensink
Workshops Joint COCO and LVIS Recognition Challenge Organizers: Alexander Kirillov, Tsung-Yi Lin, Yin Cui, Matteo Ruggero Ronchi, Agrim Gupta, Ross Girshick, Piotr Dollar
4D Vision Organizers: Anelia Angelova, Vincent Casser, Jürgen Sturm, Noah Snavely, Rahul Sukthankar
This week, the 16th European Conference on Computer Vision (ECCV2020) begins, a premier forum for the dissemination of research in computer vision and related fields. Being held virtually for the first time this year, Google is proud to be an ECCV2020 Platinum Partner and is excited to share our research with the community with nearly 50 accepted publications, alongside several tutorials and workshops.
If you are registered for ECCV this year, please visit our virtual booth in the Platinum Exhibition Hall to learn more about the research we’re presenting at ECCV 2020, including some demos and opportunities to connect with our researchers. You can also learn more about our contributions below (Google affiliations in bold).
Organizing Committee General Chairs: Vittorio Ferrari, Bob Fisher, Cordelia Schmid, Emanuele TrucoAcademic Demonstrations Chair: Thomas Mensink
Workshops Joint COCO and LVIS Recognition Challenge Organizers: Alexander Kirillov, Tsung-Yi Lin, Yin Cui, Matteo Ruggero Ronchi, Agrim Gupta, Ross Girshick, Piotr Dollar
4D Vision Organizers: Anelia Angelova, Vincent Casser, Jürgen Sturm, Noah Snavely, Rahul Sukthankar
Posted by Jaqui Herman and Cat Armato, Program Managers
Machine learning is a key strategic focus at Google, with highly active groups pursuing research in virtually all aspects of the field, including deep learning and more classical algorithms, exploring theory as well as application. We utilize scalable tools and architectures to build machine learning systems that enable us to solve deep scientific and engineering challenges in areas of language, speech, translation, music, visual processing and more.
As a leader in machine learning research, Google is proud to be a Platinum Sponsor of the thirty-seventh International Conference on Machine Learning (ICML 2020), a premier annual event taking place virtually this week. With over 100 accepted publications and Googlers participating in workshops, we look forward to our continued collaboration with the larger machine learning research community.
If you're registered for ICML 2020, we hope you'll visit the Google virtual booth to learn more about the exciting work, creativity and fun that goes into solving some of the field's most interesting challenges. You can also learn more about the Google research being presented at ICML 2020 in the list below (Google affiliations bolded).
Stochastic Flows and Geometric Optimization on the Orthogonal Group Krzysztof Choromanski, David Cheikhi, Jared Davis, Valerii Likhosherstov, Achille Nazaret, Achraf Bahamou, Xingyou Song, Mrugank Akarte, Jack Parker-Holder, Jacob Bergquist, Yuan Gao, Aldo Pacchiano, Tamas Sarlos, Adrian Weller, Vikas Sindhwani
Is Local SGD Better than Minibatch SGD? Blake Woodworth, Kumar Kshitij Patel, Sebastian U. Stich, Zhen Dai, Brian Bullins, H. Brendan McMahan, Ohad Shamir, Nathan Sreb
Workshops New In ML Invited Speaker:Nicolas Le Roux Organizers: Zhen Xu, Sparkle Russell-Puleri, Zhengying Liu, Sinead A Williamson, Matthias W Seeger, Wei-Wei Tu, Samy Bengio, Isabelle Guyon
Healthcare Systems, Population Health, and the Role of Health-tech Organizers:Krzysztof Choromanski, David Cheikhi, Jared Davis, Valerii Likhosherstov, Achille Nazaret, Achraf Bahamou, Xingyou Song, Mrugank Akarte, Jack Parker-Holder, Jacob Bergquist, Yuan Gao, Aldo Pacchiano, Tamas Sarlos, Adrian Weller, Vikas Sindhwani
Organizers: Sharon Li, Balaji Lakshminarayanan, Dan Hendrycks, Thomas Dietterich, Jasper Snoek Program Committee:Jeremiah Liu, Jie Ren, Rodolphe Jenatton, Zack Nado, Alexander Alemi, Florian Wenzel, Mike Dusenberry, Raphael Lopes
Graph Representation Learning and Beyond (GRL+) Organizers: Michael Bronstein, Andreea Deac, William L. Hamilton, Jessica B. Hamrick, Milad Hashemi, Stefanie Jegelka, Jure Leskovec, Renjie Liao, Federico Monti, Yizhou Sun, Kevin Swersky, Petar Veličković, Rex Ying, Marinka Žitnik Speakers:Thomas Kipf Program Committee:Bryan Perozzi, Kevin Swersky, Milad Hashemi, Thomas Kipf, Ting Cheng
ML Interpretability for Scientific Discovery Organizers:Subhashini Venugopalan, Michael Brenner, Scott Linderman, Been Kim Program Committee:Akinori Mitani, Arunachalam Narayanaswamy, Avinash Varadarajan, Awa Dieng, Benjamin Sanchez-Lengeling, Bo Dai, Stephan Hoyer, Subham Sekhar Sahoo, Suhani Vora Steering Committee: John Platt, Mukund Sundararajan, Jon Kleinberg
Machine Learning for Global Health Organizers: Danielle Belgrave, Danielle Belgrave, Stephanie Hyland, Charles Onu, Nicholas Furnham, Ernest Mwebaze, Neil Lawrence
Posted by Cat Armato and Emily Knapp, Program Managers
This week, the 58th Annual Meeting of the Association for Computational Linguistics (ACL 2020), a premier conference covering a broad spectrum of research areas that are concerned with computational approaches to natural language, takes place online.
As a leader in natural language processing and understanding, and a Diamond Level sponsor of ACL 2020, Google will showcase the latest research in the field with over 30 publications, and the organization of and participation in a variety of workshops and tutorials.
If you’re registered for ACL 2020, we hope that you’ll visit the Google virtual booth to learn more about the projects and opportunities at Google that go into solving interesting problems for billions of people. You can also learn more about the Google research being presented at ACL 2020 below (Google affiliations bolded).
Committees Diversity & Inclusion (D&I) Chair: Vinodkumar Prabhakaran Accessibility Chair:Sushant Kafle Local Sponsorship Chair:Kristina Toutanova Virtual Infrastructure Committee: Yi Luan Area Chairs: Anders Søgaard, Ankur Parikh, Annie Louis, Bhuvana Ramabhadran, Christo Kirov, Daniel Cer, Dipanjan Das, Diyi Yang, Emily Pitler, Eunsol Choi, George Foster, Idan Szpektor, Jacob Eisenstein, Jason Baldridge, Jun Suzuki, Kenton Lee, Luheng He, Marius Pasca, Ming-Wei Chang, Sebastian Gehrmann, Shashi Narayan, Slav Petrov, Vinodkumar Prabhakaran, Waleed Ammar, William Cohen
NLPMC - NLP for Medical Conversations Parminder Bhatia, Chaitanya Shivade, Mona Diab, Byron Wallace, Rashmi Gangadharaiah, Nan Du, Izhak Shafran and Steven Lin