Posted by Shaina Mehta and Kristen Borg, Program Managers This week marks the beginning of the premier annual Computer Vision and Pattern Recognition conference (CVPR 2022), held both in-person in New Orleans, LA and virtually. As a leader in computer vision research and a Platinum Sponsor, Google will have a strong presence across CVPR 2022 with over 80 papers being presented at the main conference and active involvement in a number of conference workshops and tutorials.
If you are attending CVPR this year, please stop by our booth and chat with our researchers who are actively exploring the latest machine learning techniques for application to various areas of machine perception. Our researchers will also be available to talk about and demo several recent efforts, including on-device ML applications with MediaPipe, the Auto Arborist Dataset for urban forest monitoring, and much more.
You can also learn more about our research being presented at CVPR 2022 in the list below (Google affiliations in bold).
Organizing Committee
Tutorials Chairs
Include: Boqing Gong
Website Chairs
Include: AJ Piergiovanni
Area Chairs
Include: Alireza Fathi, Cordelia Schmid, Deqing Sun, Jonathan Barron, Michael Ryoo, Supasorn Suwajanakorn, Susanna Ricco
Diversity, Equity, and Inclusion Chairs
Include: Noah Snavely
Panel Discussion: Embodied Computer Vision
Panelists include: Michael Ryoo
Publications
Learning to Prompt for Continual Learning (see blog post)
Zifeng Wang*, Zizhao Zhang, Chen-Yu Lee, Han Zhang, Ruoxi Sun, Xiaoqi Ren, Guolong Su, Vincent Perot, Jennifer Dy, Tomas Pfister
GCR: Gradient Coreset Based Replay Buffer Selection for Continual Learning
Rishabh Tiwari, Krishnateja Killamsetty, Rishabh Iyer, Pradeep Shenoy
Zero-Shot Text-Guided Object Generation with Dream Fields
Ajay Jain, Ben Mildenhall, Jonathan T. Barron, Pieter Abbeel, Ben Poole
Towards End-to-End Unified Scene Text Detection and Layout Analysis
Shangbang Long, Siyang Qin, Dmitry Panteleev, Alessandro Bissacco, Yasuhisa Fujii, Michalis Raptis
FLOAT: Factorized Learning of Object Attributes for Improved Multi-object Multi-part Scene Parsing
Rishubh Singh, Pranav Gupta, Pradeep Shenoy, Ravikiran Sarvadevabhatla
LOLNerf: Learn from One Look
Daniel Rebain, Mark Matthews, Kwang Moo Yi, Dmitry Lagun, Andrea Tagliasacchi
Photorealistic Monocular 3D Reconstruction of Humans Wearing Clothing
Thiemo Alldieck, Mihai Zanfir, Cristian Sminchisescu
Learning Local Displacements for Point Cloud Completion
Yida Wang, David Joseph Tan, Nassir Navab, Federico Tombari
Density-Preserving Deep Point Cloud Compression
Yun He, Xinlin Ren, Danhang Tang, Yinda Zhang, Xiangyang Xue, Yanwei Fu
CMT-DeepLab: Clustering Mask Transformers for Panoptic Segmentation
Qihang Yu*, Huiyu Wang, Dahun Kim, Siyuan Qiao, Maxwell Collins, Yukun Zhu, Hartwig Adam, Alan Yuille, Liang-Chieh Chen
Deformable Sprites for Unsupervised Video Decomposition
Vickie Ye, Zhengqi Li, Richard Tucker, Angjoo Kanazawa, Noah Snavely
Learning with Neighbor Consistency for Noisy Labels
Ahmet Iscen, Jack Valmadre, Anurag Arnab, Cordelia Schmid
Multiview Transformers for Video Recognition
Shen Yan, Xuehan Xiong, Anurag Arnab, Zhichao Lu, Mi Zhang, Chen Sun, Cordelia Schmid
Kubric: A Scalable Dataset Generator
Klaus Greff, Francois Belletti, Lucas Beyer, Carl Doersch, Yilun Du, Daniel Duckworth, David J. Fleet, Dan Gnanapragasam, Florian Golemo, Charles Herrmann, Thomas Kipf, Abhijit Kundu, Dmitry Lagun, Issam Laradji, Hsueh-Ti (Derek) Liu, Henning Meyer, Yishu Miao, Derek Nowrouzezahrai, Cengiz Oztireli, Etienne Pot, Noha Radwan*, Daniel Rebain, Sara Sabour, Mehdi S. M. Sajjadi, Matan Sela, Vincent Sitzmann, Austin Stone, Deqing Sun, Suhani Vora, Ziyu Wang, Tianhao Wu, Kwang Moo Yi, Fangcheng Zhong, Andrea Tagliasacchi
3D Moments from Near-Duplicate Photos
Qianqian Wang, Zhengqi Li, David Salesin, Noah Snavely, Brian Curless, Janne Kontkanen
Mip-NeRF 360: Unbounded Anti-Aliased Neural Radiance Fields
Jonathan T. Barron, Ben Mildenhall, Dor Verbin, Pratul P. Srinivasan, Peter Hedman
RegNeRF: Regularizing Neural Radiance Fields for View Synthesis from Sparse Inputs
Michael Niemeyer*, Jonathan T. Barron, Ben Mildenhall, Mehdi S. M. Sajjadi, Andreas Geiger, Noha Radwan*
Ref-NeRF: Structured View-Dependent Appearance for Neural Radiance Fields
Dor Verbin, Peter Hedman, Ben Mildenhall, Todd Zickler, Jonathan T. Barron, Pratul P. Srinivasan
IRON: Inverse Rendering by Optimizing Neural SDFs and Materials from Photometric Images
Kai Zhang, Fujun Luan, Zhengqi Li, Noah Snavely
MAXIM: Multi-Axis MLP for Image Processing
Zhengzhong Tu*, Hossein Talebi, Han Zhang, Feng Yang, Peyman Milanfar, Alan Bovik, Yinxiao Li
Restormer: Efficient Transformer for High-Resolution Image Restoration
Syed Waqas Zamir, Aditya Arora, Salman Khan, Munawar Hayat, Fahad Shahbaz Khan, Ming-Hsuan Yang
Burst Image Restoration and Enhancement
Akshay Dudhane, Syed Waqas Zamir, Salman Khan, Fahad Shahbaz Khan, Ming-Hsuan Yang
Neural RGB-D Surface Reconstruction
Dejan Azinović, Ricardo Martin-Brualla, Dan B Goldman, Matthias Nießner, Justus Thies
Scene Representation Transformer: Geometry-Free Novel View Synthesis Through Set-Latent Scene Representations
Mehdi S. M. Sajjadi, Henning Meyer, Etienne Pot, Urs Bergmann, Klaus Greff, Noha Radwan*, Suhani Vora, Mario Lučić, Daniel Duckworth, Alexey Dosovitskiy*, Jakob Uszkoreit*, Thomas Funkhouser, Andrea Tagliasacchi*
ZebraPose: Coarse to Fine Surface Encoding for 6DoF Object Pose Estimation
Yongzhi Su, Mahdi Saleh, Torben Fetzer, Jason Rambach, Nassir Navab, Benjamin Busam, Didier Stricker, Federico Tombari
MetaPose: Fast 3D Pose from Multiple Views without 3D Supervision
Ben Usman, Andrea Tagliasacchi, Kate Saenko, Avneesh Sud
GPV-Pose: Category-Level Object Pose Estimation via Geometry-Guided Point-wise Voting
Yan Di, Ruida Zhang, Zhiqiang Lou, Fabian Manhardt, Xiangyang Ji, Nassir Navab, Federico Tombari
Rethinking Deep Face Restoration
Yang Zhao*, Yu-Chuan Su, Chun-Te Chu, Yandong Li, Marius Renn, Yukun Zhu, Changyou Chen, Xuhui Jia
Transferability Metrics for Selecting Source Model Ensembles
Andrea Agostinelli, Jasper Uijlings, Thomas Mensink, Vittorio Ferrari
Robust Fine-Tuning of Zero-Shot Models
Mitchell Wortsman, Gabriel Ilharco, Jong Wook Kim, Mike Li, Simon Kornblith, Rebecca Roelofs, Raphael Gontijo Lopes, Hannaneh Hajishirzi, Ali Farhadi, Hongseok Namkoong, Ludwig Schmidt
Block-NeRF: Scalable Large Scene Neural View Synthesis
Matthew Tancik, Vincent Casser, Xinchen Yan, Sabeek Pradhan, Ben Mildenhall, Pratul P. Srinivasan, Jonathan T. Barron, Henrik Kretzschmar
Light Field Neural Rendering
Mohammad Suhail*, Carlos Esteves, Leonid Sigal, Ameesh Makadia
Transferability Estimation Using Bhattacharyya Class Separability
Michal Pándy, Andrea Agostinelli, Jasper Uijlings, Vittorio Ferrari, Thomas Mensink
Matching Feature Sets for Few-Shot Image Classification
Arman Afrasiyabi, Hugo Larochelle, Jean-François Lalonde, Christian Gagné
Which Model to Transfer? Finding the Needle in the Growing Haystack
Cedric Renggli, André Susano Pinto, Luka Rimanic, Joan Puigcerver, Carlos Riquelme, Ce Zhang, Mario Lučić
Auditing Privacy Defenses in Federated Learning via Generative Gradient Leakage
Zhuohang Li, Jiaxin Zhang, Luyang Liu, Jian Liu
Estimating Example Difficulty Using Variance of Gradients
Chirag Agarwal, Daniel D'souza, Sara Hooker
More Than Words: In-the-Wild Visually-Driven Prosody for Text-to-Speech (see blog post)
Michael Hassid, Michelle Tadmor Ramanovich, Brendan Shillingford, Miaosen Wang, Ye Jia, Tal Remez
Robust Outlier Detection by De-Biasing VAE Likelihoods
Kushal Chauhan, Barath Mohan U, Pradeep Shenoy, Manish Gupta, Devarajan Sridharan
Deep 3D-to-2D Watermarking: Embedding Messages in 3D Meshes and Extracting Them from 2D Renderings
Innfarn Yoo, Huiwen Chang, Xiyang Luo, Ondrej Stava, Ce Liu*, Peyman Milanfar, Feng Yang
Knowledge Distillation: A Good Teacher Is Patient and Consistent
Lucas Beyer, Xiaohua Zhai, Amélie Royer*, Larisa Markeeva*, Rohan Anil, Alexander Kolesnikov
Urban Radiance Fields
Konstantinos Rematas, Andrew Liu, Pratul P. Srinivasan, Jonathan T. Barron, Andrea Tagliasacchi, Thomas Funkhouser, Vittorio Ferrari
Manifold Learning Benefits GANs
Yao Ni, Piotr Koniusz, Richard Hartley, Richard Nock
MaskGIT: Masked Generative Image Transformer
Huiwen Chang, Han Zhang, Lu Jiang, Ce Liu*, William T. Freeman
InOut: Diverse Image Outpainting via GAN Inversion
Yen-Chi Cheng, Chieh Hubert Lin, Hsin-Ying Lee, Jian Ren, Sergey Tulyakov, Ming-Hsuan Yang
Scaling Vision Transformers (see blog post)
Xiaohua Zhai, Alexander Kolesnikov, Neil Houlsby, Lucas Beyer
Fine-Tuning Image Transformers Using Learnable Memory
Mark Sandler, Andrey Zhmoginov, Max Vladymyrov, Andrew Jackson
PokeBNN: A Binary Pursuit of Lightweight Accuracy
Yichi Zhang*, Zhiru Zhang, Lukasz Lew
Bending Graphs: Hierarchical Shape Matching Using Gated Optimal Transport
Mahdi Saleh, Shun-Cheng Wu, Luca Cosmo, Nassir Navab, Benjamin Busam, Federico Tombari
Uncertainty-Aware Deep Multi-View Photometric Stereo
Berk Kaya, Suryansh Kumar, Carlos Oliveira, Vittorio Ferrari, Luc Van Gool
Depth-Supervised NeRF: Fewer Views and Faster Training for Free
Kangle Deng, Andrew Liu, Jun-Yan Zhu, Deva Ramanan
Dense Depth Priors for Neural Radiance Fields from Sparse Input Views
Barbara Roessle, Jonathan T. Barron, Ben Mildenhall, Pratul P. Srinivasan, Matthias Nießner
Trajectory Optimization for Physics-Based Reconstruction of 3D Human Pose from Monocular Video
Erik Gärtner, Mykhaylo Andriluka, Hongyi Xu, Cristian Sminchisescu
Differentiable Dynamics for Articulated 3D Human Motion Reconstruction
Erik Gärtner, Mykhaylo Andriluka, Erwin Coumans, Cristian Sminchisescu
Panoptic Neural Fields: A Semantic Object-Aware Neural Scene Representation
Abhijit Kundu, Kyle Genova, Xiaoqi Yin, Alireza Fathi, Caroline Pantofaru, Leonidas J. Guibas, Andrea Tagliasacchi, Frank Dellaert, Thomas Funkhouser
Pyramid Adversarial Training Improves ViT Performance
Charles Herrmann, Kyle Sargent, Lu Jiang, Ramin Zabih, Huiwen Chang, Ce Liu*, Dilip Krishnan, Deqing Sun
Proper Reuse of Image Classification Features Improves Object Detection
Cristina Vasconcelos, Vighnesh Birodkar, Vincent Dumoulin
SOMSI: Spherical Novel View Synthesis with Soft Occlusion Multi-Sphere Images
Tewodros Habtegebrial, Christiano Gava, Marcel Rogge, Didier Stricker, Varun Jampani
TubeFormer-DeepLab: Video Mask Transformer
Dahun Kim, Jun Xie, Huiyu Wang, Siyuan Qiao, Qihang Yu, Hong-Seok Kim, Hartwig Adam, In So Kweon, Liang-Chieh Chen
Contextualized Spatio-Temporal Contrastive Learning with Self-Supervision
Liangzhe Yuan, Rui Qian*, Yin Cui, Boqing Gong, Florian Schroff, Ming-Hsuan Yang, Hartwig Adam, Ting Liu
When Does Contrastive Visual Representation Learning Work?
Elijah Cole, Xuan Yang, Kimberly Wilber, Oisin Mac Aodha, Serge Belongie
Less Is More: Generating Grounded Navigation Instructions from Landmarks
Su Wang, Ceslee Montgomery, Jordi Orbay, Vighnesh Birodkar, Aleksandra Faust, Izzeddin Gur, Natasha Jaques, Austin Waters, Jason Baldridge, Peter Anderson
Forecasting Characteristic 3D Poses of Human Actions
Christian Diller, Thomas Funkhouser, Angela Dai
BEHAVE: Dataset and Method for Tracking Human Object Interactions
Bharat Lal Bhatnagar, Xianghui Xie, Ilya A. Petrov, Cristian Sminchisescu, Christian Theobalt, Gerard Pons-Moll
Motion-from-Blur: 3D Shape and Motion Estimation of Motion-Blurred Objects in Videos
Denys Rozumnyi, Martin R. Oswald, Vittorio Ferrari, Marc Pollefeys
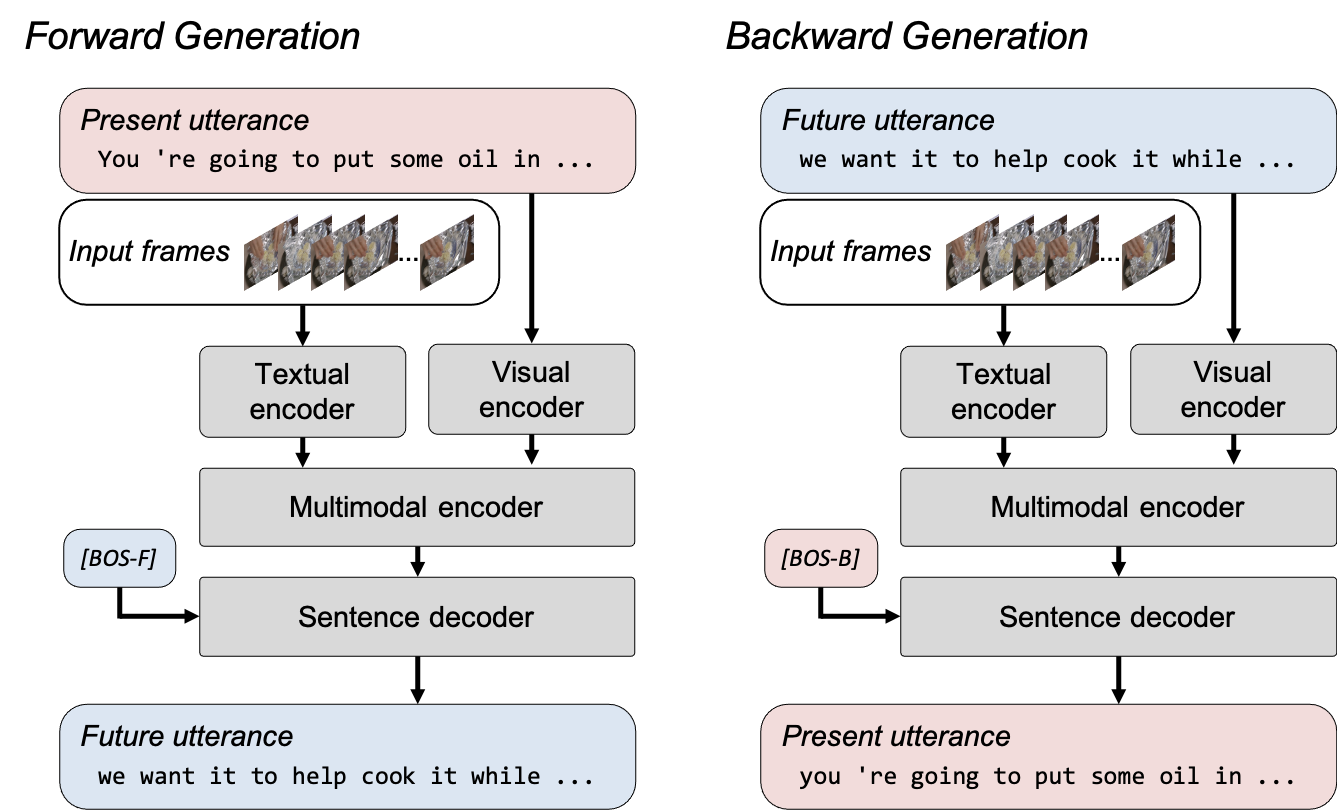
End-to-End Generative Pretraining for Multimodal Video Captioning (see blog post)
Paul Hongsuck Seo, Arsha Nagrani, Anurag Arnab, Cordelia Schmid
Uncertainty-Aware Adaptation for Self-Supervised 3D Human Pose Estimation
Jogendra Nath Kundu, Siddharth Seth, Pradyumna YM, Varun Jampani, Anirban Chakraborty, R. Venkatesh Babu
Learning ABCs: Approximate Bijective Correspondence for Isolating Factors of Variation with Weak Supervision
Kieran A. Murphy, Varun Jampani, Srikumar Ramalingam, Ameesh Makadia
HumanNeRF: Free-Viewpoint Rendering of Moving People from Monocular Video
Chung-Yi Weng, Brian Curless, Pratul P. Srinivasan, Jonathan T. Barron, Ira Kemelmacher-Shlizerman
Deblurring via Stochastic Refinement
Jay Whang*, Mauricio Delbracio, Hossein Talebi, Chitwan Saharia, Alexandros G. Dimakis, Peyman Milanfar
NeRF in the Dark: High Dynamic Range View Synthesis from Noisy Raw Images
Ben Mildenhall, Peter Hedman, Ricardo Martin-Brualla, Pratul P. Srinivasan, Jonathan T. Barron
CoNeRF: Controllable Neural Radiance Fields
Kacper Kania, Kwang Moo Yi, Marek Kowalski, Tomasz Trzciński, Andrea Tagliasacchi
A Conservative Approach for Unbiased Learning on Unknown Biases
Myeongho Jeon, Daekyung Kim, Woochul Lee, Myungjoo Kang, Joonseok Lee
DeepFusion: Lidar-Camera Deep Fusion for Multi-Modal 3D Object Detection (see blog post)
Yingwei Li*, Adams Wei Yu, Tianjian Meng, Ben Caine, Jiquan Ngiam, Daiyi Peng, Junyang Shen, Yifeng Lu, Denny Zhou, Quoc V. Le, Alan Yuille, Mingxing Tan
Video Frame Interpolation Transformer
Zhihao Shi, Xiangyu Xu, Xiaohong Liu, Jun Chen, Ming-Hsuan Yang
Global Matching with Overlapping Attention for Optical Flow Estimation
Shiyu Zhao, Long Zhao, Zhixing Zhang, Enyu Zhou, Dimitris Metaxas
LiT: Zero-Shot Transfer with Locked-image Text Tuning (see blog post)
Xiaohua Zhai, Xiao Wang, Basil Mustafa, Andreas Steiner, Daniel Keysers, Alexander Kolesnikov, Lucas Beyer
Are Multimodal Transformers Robust to Missing Modality?
Mengmeng Ma, Jian Ren, Long Zhao, Davide Testuggine, Xi Peng
3D-VField: Adversarial Augmentation of Point Clouds for Domain Generalization in 3D Object Detection
Alexander Lehner, Stefano Gasperini, Alvaro Marcos-Ramiro, Michael Schmidt, Mohammad-Ali Nikouei Mahani, Nassir Navab, Benjamin Busam, Federico Tombari
SHIFT: A Synthetic Driving Dataset for Continuous Multi-Task Domain Adaptation
Tao Sun, Mattia Segu, Janis Postels, Yuxuan Wang, Luc Van Gool, Bernt Schiele, Federico Tombari, Fisher Yu
H4D: Human 4D Modeling by Learning Neural Compositional Representation
Boyan Jiang, Yinda Zhang, Xingkui Wei, Xiangyang Xue, Yanwei Fu
Gravitationally Lensed Black Hole Emission Tomography
Aviad Levis, Pratul P. Srinivasan, Andrew A. Chael, Ren Ng, Katherine L. Bouman
Deep Saliency Prior for Reducing Visual Distraction
Kfir Aberman, Junfeng He, Yossi Gandelsman, Inbar Mosseri, David E. Jacobs, Kai Kohlhoff, Yael Pritch, Michael Rubinstein
The Auto Arborist Dataset: A Large-Scale Benchmark for Multiview Urban Forest Monitoring Under Domain Shift
Sara Beery, Guanhang Wu, Trevor Edwards, Filip Pavetic, Bo Majewski, Shreyasee Mukherjee, Stanley Chan, John Morgan, Vivek Rathod, Jonathan Huang
Workshops
Ethical Considerations in Creative Applications of Computer Vision
Chairs and Advisors: Negar Rostamzadeh, Fernando Diaz, Emily Denton, Mark Diaz, Jason Baldridge
Dynamic Neural Networks Meet Computer Vision Organizers
Invited Speaker: Barret Zoph
Precognition: Seeing Through the Future
Organizer: Utsav Prabhu
Invited Speaker: Sella Nevo
Computer Vision in the Built Environment for the Design, Construction, and Operation of Buildings
Invited Speakers: Thomas Funkhouser, Federico Tombari
Neural Architecture Search: Lightweight NAS Challenge
Invited Speaker: Barret Zoph
Transformers in Vision
Organizer: Lucas Beyer
Invited Speakers and Panelists: Alexander Kolesnikov, Mathilde Caron, Arsha Nagrani, Lucas Beyer
Challenge on Learned Image Compression
Organizers: George Toderici, Johannes Balle, Eirikur Agustsson, Nick Johnston, Fabian Mentzer, Luca Versari
Invited Speaker: Debargha Mukherjee
Embodied AI
Organizers: Anthony Francis, Sören Pirk, Alex Ku, Fei Xia, Peter Anderson
Scientific Advisory Board Members: Alexander Toshev, Jie Tan
Invited Speaker: Carolina Parada
Sight and Sound
Organizers: Arsha Nagrani, William Freeman
New Trends in Image Restoration and Enhancement
Organizers: Ming-Hsuan Yang, Vivek Kwatra, George Toderici
EarthVision: Large Scale Computer Vision for Remote Sensing Imagery
Invited Speaker: John Quinn
LatinX in Computer Vision Research
Organizer: Ruben Villegas
Fine-Grained Visual Categorization
Organizer: Kimberly Wilber
The Art of Robustness: Devil and Angel in Adversarial Machine Learning
Organizer: Florian Tramèr
Invited Speaker: Nicholas Carlini
AI for Content Creation
Organizers: Deqing Sun, Huiwen Chang, Lu Jiang
Invited Speaker: Chitwan Saharia
LOng-form VidEo Understanding
Invited Speaker: Cordelia Schmid
Visual Perception and Learning in an Open World
Invited Speaker: Rahul Sukthankar
Media Forensics
Organizer : Christoph Bregler
Technical Committee Members: Shruti Agarwal, Scott McCloskey, Peng Zhou
Vision Datasets Understanding
Organizer: José Lezama
Embedded Vision
Invited Speaker: Matthias Grundmann
Federated Learning for Computer Vision
Invited Speaker: Zheng Xu
Large Scale Holistic Video Understanding
Organizer: David Ross
Invited Speaker: Anurag Arnab
Learning With Limited Labelled Data for Image and Video Understanding
Invited Speaker: Hugo Larochelle
Bridging the Gap Between Computational Photography and Visual Recognition
Invited Speaker: Xiaohua Zhai
Explainable Artificial Intelligence for Computer Vision
Invited Speaker: Been Kim
Robustness in Sequential Data
Organizers: Sayna Ebrahimi, Kevin Murphy
Invited Speakers: Sayna Ebrahimi, Balaji Lakshminarayanan
Sketch-Oriented Deep Learning
Organizer: David Ha
Invited Speaker: Jonas Jongejan
Multimodal Learning and Applications
Invited Speaker: Cordelia Schmid
Computational Cameras and Displays
Organizer: Tali Dekel
Invited Speaker: Peyman Millanfar
Artificial Social Intelligence
Invited Speaker: Natasha Jaques
VizWiz Grand Challenge: Algorithms to Assist People Who Are Blind
Invited Speaker and Panelist: Andrew Howard
Image Matching: Local Features & Beyond
Organizer: Eduard Trulls
Multi-Agent Behavior: Representation, Modeling, Measurement, and Applications
Organizer: Ting Liu
Efficient Deep Learning for Computer Vision
Organizers: Pete Warden, Andrew Howard, Grace Chu, Jaeyoun Kim
Gaze Estimation and Prediction in the Wild
Organizer: Thabo Beeler
Tutorials
Denoising Diffusion-Based Generative Modeling: Foundations and Applications
Invited Speaker: Ruiqi Gao
Algorithmic Fairness: Why It's Hard and Why It's Interesting
Invited Speaker: Sanmi Koyejo
Beyond Convolutional Neural Networks
Invited Speakers: Neil Houlsby, Alexander Kolesnikov, Xiaohua Zhai
Joint Ego4D and Egocentric Perception, Interaction & Computing
Invited Speaker: Vittorio Ferrari
Deep AUC Maximization
Invited Speakers: Tianbao Yang
Vision-Based Robot Learning
Organizers: Michael S. Ryoo, Andy Zeng, Pete Florence
Graph Machine Learning for Visual Computing
Organizers: Federico Tombari
Invited Speakers: Federico Tombari, Fabian Manhardt
*Work done while at Google. ↩








































{kind=link}
{kind=link}